试卷代号:1118 座位号■■ 中央广播电视大学2008一2009学年度第二学期“开放本科”期末考试 机电一体化系统设计基础试题 2009年7月 题 号 二 三 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(正确的打√,错误的打×,每题2分,共20分) 1.驱动部分在控制信息作用下提供动力,伺服驱动包括电动、气动、液压等各种类型的驱 动装置。 () 2.机电一体化产品的适应性设计是指改变产品部分结构尺寸而形成系列产品的设计。 () 3.在全自动洗衣机产品的设计过程中,控制系统软件的设计是理论分析阶段的任务之一。 () 4.电气驱动部件的固有频率应高于机械传动系统的基本固有频率2~3倍。 () 5.在闭环控制系统中,驱动装置中各环节的误差因其在系统中所处的位置不同,对系统输 出精度的影响不同。 () 6.驱动电路中采用脉冲调制(PWM)放大器的优点是功率管工作在开关状态、管耗小。 () 7.通常,提高响应速度和提高系统的动态精度是有矛盾的,若想同时实现高速度和高精 度,需要综合考虑各环节和整个系统的控制形式。 () 8.在工控机系统的总线中,数据总线的功能是确定总线上信息流的时序。 9.TTL电平接口能用于输出指示灯的控制,也能用于驱动带电气隔离的继电器。() 10.传感器的静态特性是特指输入量为常量时,传感器的输出与输人之间的关系。() 729
试卷代号:1118 座位号巨工口 中央广播电视大学2008-2009学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题 2009年 7月 题 号 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(正确的打丫 ,错误 的打X,每题 2分 ,共 20分) 1.驱动部分在控制信息作用下提供动力 ,伺服驱动包括 电动、气 动、液压等各种类 型的驱 动装置。 ( ) 2.机电一体化产品的适应性设计是指改变产品部分结构尺寸而形成系列产品的设计。 ( ) 3.在全 自动洗衣机产品的设计过程中,控制系统软件的设计是理论分析阶段的任务之一。 ( ) 4.电气驱动部件的固有频率应高于机械传动系统的基本固有频率 2-3倍。 ( ) 5.在闭环控制系统中,驱动装置中各环节的误差因其在系统中所处的位置不同,对系统输 出精度的影响不同。 ( ) 6.驱动电路中采用脉冲调制(PWM)放大器的优点是功率管工作在开关状态、管耗小。 ( ) 7.通常,提高响应速度和提高系统的动态精度是有矛盾的,若想同时实现高速度和高精 度,需要综合考虑各环节和整个系统的控制形式。 ( ) 8.在工控机系统的总线中,数据总线的功能是确定总线上信息流的时序。 ( ) 9. TTL电平接口能用于输出指示灯的控制,也能用于驱动带电气隔离的继电器。( ) 10.传感器的静态特性是特指输人量为常量时,传感器的输出与输人之间的关系。( ) 729
得分 评卷人 二、选择题(每小题3分,共18分】 1.数控机床进给系统的伺服电机属于设备的()。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 2.为提高机电一体化机械传动系统的固有频率,应设法()。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 3.闭环控制的驱动装置中,齿轮减速器位于前向通道,所以它的()。 A.传动误差不影响输出精度,但回程误差影响输出精度 B.回程误差不影响输出精度,但传动误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 4.()又称为力矩电动机,在位置控制方式的伺服系统中,它可在堵转状态下工作。 A.永磁式直流伺服电机 B.电磁式直流伺服电机 C.永磁式交流同步伺服电机 D.笼型交流异步伺服电机 5.在工业控制应用中,为了( ),D/A转换的输出常常要配接V/I转换器。 A.抑制共模电压的干扰 B.非电压信号的转换 C.信号的放大、滤波 D.适应工业仪表的要求 6.频率响应函数是传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 730
得 分 评卷人 二、选择题 (每小题 3分 ,共 18分) 1.数控机床进给系统 的伺服电机属于设备的( )。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 2.为提高机电一体化机械传动系统的固有频率,应设法( )。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 3.闭环控制的驱动装置中,齿轮减速器位于前向通道 ,所以它的( )。 A.传动误差不影响输出精度,但回程误差影响输出精度 B.回程误差不影响输出精度,但传动误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 4.( )又称为力矩电动机,在位置控制方式的伺服系统中,它可在堵转状态下工作。 A.永磁式直流伺服 电机 B.电磁式直流伺服电机 C.永磁式交流同步伺服电机 D,笼型交流异步伺服电机 5.在工业控制应用中,为了( ),D/A转换的输 出常常要配接 V/I转换器 。 A.抑制共模 电压的干扰 B.非电压信号的转换 C.信号的放大、滤波 D.适应工业仪表的要求 6.频率响应函数是传感器的( )。 A.静态特性指标 B.动态特性指标 C.输人特性参数 D.输出特性参数 730
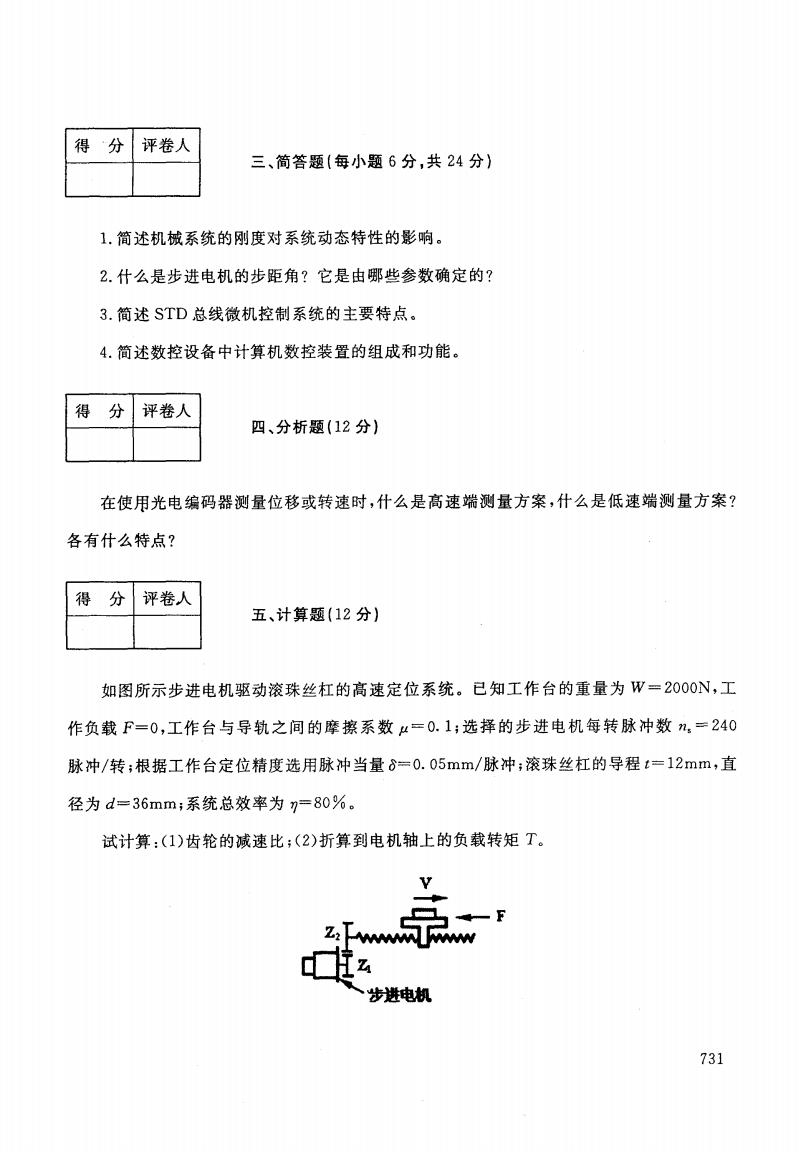
得·分 评卷人 三、简答题(每小题6分,共24分)】 1.简述机械系统的刚度对系统动态特性的影响。 2.什么是步进电机的步距角?它是由哪些参数确定的? 3.简述STD总线微机控制系统的主要特点。 4.简述数控设备中计算机数控装置的组成和功能。 得 分 评卷人 四、分析题(12分) 在使用光电编码器测量位移或转速时,什么是高速端测量方案,什么是低速端测量方案? 各有什么特点? 得 分 评卷人 五、计算题(12分) 如图所示步进电机驱动滚珠丝杠的高速定位系统。已知工作台的重量为W=2000N,工 作负载F=0,工作台与导轨之间的摩擦系数4=0.1;选择的步进电机每转脉冲数n,=240 脉冲/转;根据工作台定位精度选用脉冲当量6=0.05mm/脉冲;滚珠丝杠的导程t=12mm,直 径为d=36mm;系统总效率为7=80%。 试计算:(1)齿轮的减速比;(2)折算到电机轴上的负载转矩T。 步进电机 731
得 分 评卷人 三、简答题(每小题 6分,共 24分) 1.简述机械系统的刚度对系统动态特性的影响。 2.什么是步进电机的步距角?它是由哪些参数确定的? 3.简述STD总线微机控制系统的主要特点。 4.简述数控设备中计算机数控装置的组成和功能。 得 分 评卷人 四、分析题(12分) 在使用光电编码器测量位移或转速时,什么是高速端测量方案,什么是低速端测量方案? 各有什么特点? 得 分 评卷人 五、计算题 【12分 ) 如图所示步进电机驱动滚珠丝杠的高速定位系统。已知工作台的重量为 W = 2000N,工 作负载F=0,工作台与导轨之间的摩擦系数产= 0. 1;选择的步进电机每转脉冲数n, = 240 脉冲/转;根据工作台定位精度选用脉冲当量 6=0. 05mm/脉冲;滚珠丝杠的导程 t=12mm,直 径为d=36mm;系统总效率为1=80%. 试计算:(1)齿轮的减速比;(2)折算到电机轴上的负载转矩 To 731
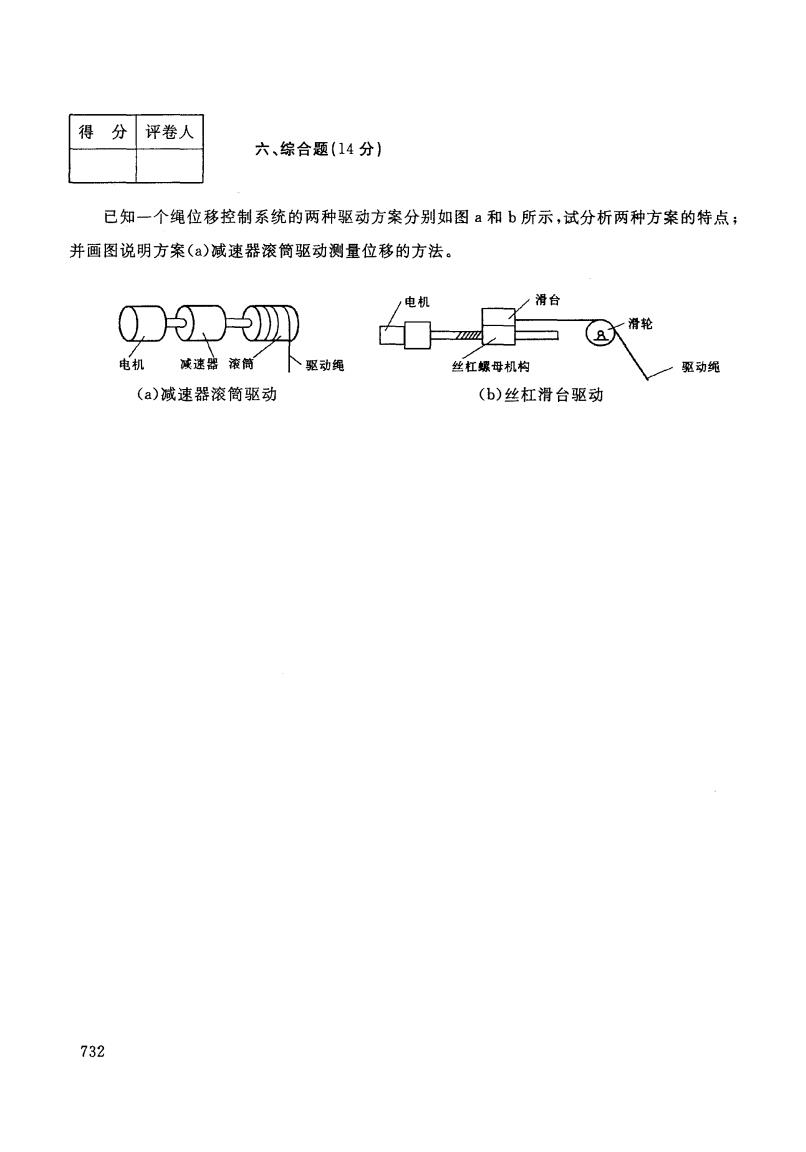
得分 评卷人 六、综合题(14分) 已知一个绳位移控制系统的两种驱动方案分别如图a和b所示,试分析两种方案的特点; 并画图说明方案(a)减速器滚筒驱动测量位移的方法。 电机 滑台 0D3D 滑轮 电机 减速器滚筒 驱动绳 丝杠螺母机构 驱动绳 (a)诚速器滚筒驱动 (b)丝杠滑台驱动 732
得 分 评卷人 六、综合题 (14分) 已知一个绳位移控制系统的两种驱动方案分别如图a和 b所示,试分析两种方案的特点 并画图说明方案(a)减速器滚筒驱动测量位移的方法 。 电机 滑台 驱动绳 驱动绳 (a)减速器滚筒驱动 (b)丝杠滑台驱动 732
试卷代号:1118 中央广播电视大学2008一2009学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2009年7月 一、判断题(每小题2分,共20分) 1.√ 2.X 3.× 4.X 5./ 6./ 7. 8.X 9.J 10.× 二、选择题(每小题3分,共18分) 1.C 2.A 3.B 4.A 5.D 6.B 三、简答题(每题6分,共24分】 1.答:机械系统的刚度对系统的主要影响表现为以下几方面: (1)失动量 系统刚度越大,因静摩擦力的作用所产生的传动部件的弹性变形越小,系 统的失动量也越小: (2)固有频率 机械系统刚度越大,固有频率越高,可远离控制系统或驱动系统的频带 宽度,从而避免产生共振: (3)稳定性 刚度对开环伺服系统的稳定性没有影响,而对闭环伺服系统的稳定性有很 大影响,提高刚度可增加闭环系统的稳定性。 2.答:步进电机在每输入一个电脉冲信号,转子所转过的角度称为步距角。它由步进电机 的相数、电机转子的齿数和电机的通电方式所决定。 3.答:STD总线微机控制系统的主要特点: (1)采用小板结构,高度的模块化,其功能模板结构灵活,可靠性高,硬件冗余小,成本低; (2)模板设计具有严格的标准和广泛的兼容性; (3)面向1/O的设计,具有强大的I/O扩展能力,使控制系统非常适合工业控制的应用; (4)高可靠性。 733
试卷代号 :1118 中央广播电视大学2008-2009学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2009年 7月 一、判断题 (每小题 2分 ,共 20分) 1.了 2. X 3.X 4.X 5.丫 6.丫 7.丫 8. X 9.丫 10. X 二、选择题 (每小题 3分 ,共 18分) 1. C 2. A 3. B 4. A 5. D 6. B 三、简答题 (每题 6分,共 24分) 1.答 :机械系统 的刚度对系统的主要影响表现为以下几方面 : (1)失动量 系统刚度越大,因静摩擦力的作用所产生的传动部件的弹性变形 越小,系 统的失动量也越小 ; (2)固有频率 机械系统刚度越大,固有频率越高,可远离控制系统或驱动系统的频带 宽度 ,从而避免产生共振; (3)稳定性 刚度对开环伺服系统的稳定性没有影响 ,而对闭环伺服系统的稳定性有很 大影响,提高刚度可增加闭环系统的稳定性。 2.答:步进电机在每输人一个电脉冲信号,转子所转过的角度称为步距角。它由步进电机 的相数、电机转子的齿数和电机的通电方式所决定 。 3.答:STD总线微机控制系统的主要特点: (1)采用小板结构,高度的模块化,其功能模板结构灵活,可靠性高,硬件冗余小,成本低; (2)模板设计具有严格的标准和广泛的兼容性; (3)面向 1/O的设计,具有强大的 1/O扩展能力,使控制系统非常适合工业控制的应用; (4)高可靠性。 733
4.答:在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输入输出接口以及机床控制器等部分构成。 计算机数控装置根据输入的数据和程序,完成数据运算、逻辑判断、输入输出控制等功能; 机床控制器主要用于机床的辅助功能,主轴转速的选择和换刀功能的控制。 四、分析题(12分) 答:使用光电编码器测量位移或转速有高速端测量和低速端测量两种方案。 (1)高速端测量:将编码器安装在电机轴上的测量方案。高速端测量的特点:同样的测量 精度要求较低,传动链包括在闭环之外,传动误差直接影响输出精度,传动误差无法通过控制 进行补偿,因此对传动链的精度要求较高」 (2)低速端测量:将编码器安装在负载轴上的测量方案。低速端测量的特点:对编码器的 精度要求较高,传动链包括在闭环之内,从而通过闭环来消除传动误差,对传动链的精度要求 较低。 五、计算题(12分) 解:(1)齿轮的减速比i 12 m:8Xn,0.05X240=1 (2)负载力由外负载力和摩擦力两部分构成 外负载力F=ON; 摩擦力Fy=4·W=0.1×2000=200N。 电机上的负载力矩为 T=是·云(F+F)月 =片×12X10×0+20)×8=0.48N·m 2π 六、综合题(14分)】 解:1.驱动特点: 方案a 结构简单、易实现。绳的位移可以很大,但绳在滚筒方向会产生横向位移。需要采用制动 器或者止逆型减速器才能防止绳对电机的反向驱动。 734
4.答:在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输人输出接口以及机床控制器等部分构成。 计算机数控装置根据输人的数据和程序,完成数据运算、逻辑判断、输人输出控制等功能; 机床控制器主要用于机床的辅助功能,主轴转速的选择和换刀功能的控制。 四、分析题(12分) 答:使用光电编码器测量位移或转速有高速端测量和低速端测量两种方案。 (1)高速端测量:将编码器安装在电机轴上的测量方案。高速端测量的特点:同样的测量 精度要求较低,传动链包括在闭环之外,传动误差直接影响输出精度,传动误差无法通过控制 进行补偿 ,因此对传动链的精度要求较高。 (2)低速端测量 :将编码器安装在负载轴上的测量方案 。低速端测量 的特点 :对编码器 的 精度要求较高 ,传动链包括在闭环之内,从而通过闭环来消除传动误差 ,对传动链的精度要求 较低 。 五、计算题(12分) 解 :(1)齿轮的减速 比 i ‘一n2一8.Xn,一0. 05 X 240一‘ (2)负载力由外负载力和摩擦力两部分构成 外负载力 F=ON; 摩擦力Fj=/,·W=0. 1 X 2000 =200N. 电机上的负载力矩为 _ 1 t ,_ ._、 1 T=舟 i ·分2n·(、F一+ ’F一f’)‘·二刀 1、 =丁入 12又10一3 2盯 1 入 CU州一GUU)入 - = U. 46剑 .m u.石 六、综合题(14分) 解:1.驱动特点: 方案 a 结构简单、易实现。绳的位移可以很大,但绳在滚筒方向会产生横向位移。需要采用制动 器或者止逆型减速器才能防止绳对电机的反向驱动。 734
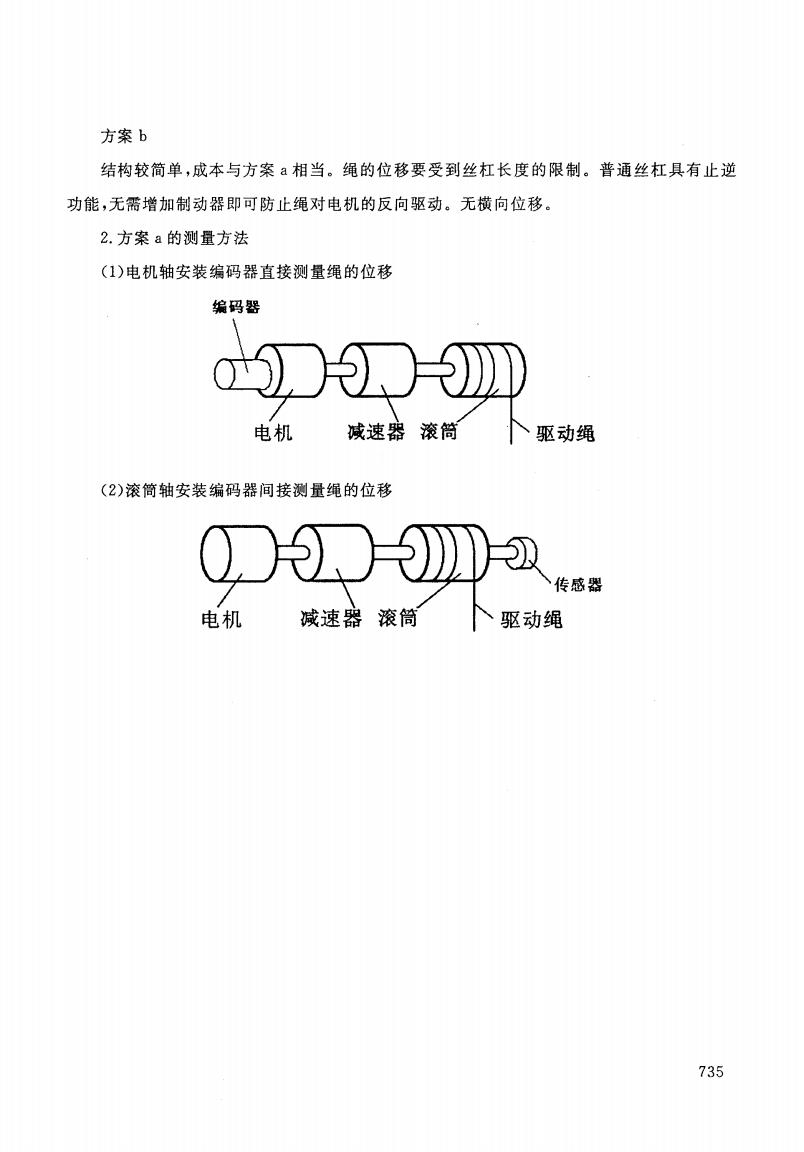
方案b 结构较简单,成本与方案相当。绳的位移要受到丝杠长度的限制。普通丝杠具有止逆 功能,无需增加制动器即可防止绳对电机的反向驱动。无横向位移。 2.方案a的测量方法 (1)电机轴安装编码器直接测量绳的位移 编码器 D册 电机 减速器滚筒 驱动绳 (2)滚筒轴安装编码器间接测量绳的位移 0DO- 传感器 电机 减速器滚筒 下驱动绳 735
方案 b 结构较简单 ,成本与方案 a相 当。绳的位移要受到丝杠长度的限制 。普通丝杠具有止逆 功能 ,无需增加制动器即可防止绳对 电机的反向驱动。无横向位移。 2.方案 a的测量方法 (1)电机轴安装编码器直接测量绳的位移 编 码器 驱动绳 (2)滚筒轴安装编码器间接测量绳的位移 传感器 735