试卷代号:1118 座位 中央广播电视大学2010一2011学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题 2011年7月 题 号 三 四 五 总分 分 数 得 分 评卷人 一、单选题(每小题4分,共24分) 1.以下产品不属于机电一体化产品的是()。 A.工业机器人 B.电子计算机 C.空调 D.复印机 2.导程L。=8mm的丝杠驱动总质量为60kg的工作台与工件,则其折算到丝杠上的等效 转动惯量为( )kg·mm2。 A.97 B.48.5 C.4.85 D.9.7 3.幅频特性和相频特性是模拟式传感器的()。 A,静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 4.有一脉冲电源,通过环形分配器将脉冲分配给五相十拍通电的步进电机定子励磁绕组, 已知转子有24个齿,步进电机的步距角是( )。 A.0.6 B.1.2 C.1.5 D.2° 756
试卷代号 1 1 座位号 I I 中央广播电视大学 1学年度第二学期"开放本科"期末考试 机电一体化系统设计基础试题 2011 年7 |题号|一|二|三|四|五|总分| |分数 I I I I I I 得分|评卷人 一、单选题(每小题 4分,共 4分) 1. 体化 )。 A. 人B. c. 2. 1... ===8mm 动 总 质 量 为60kg 工作 转动惯量为( )kg·mm A. 97 c. 4.85 B. 48. 5 D. 9. 7 3. 特性 是模 传 感 )。 A. B. 态特 c. 入特 参数 D. 特性参 4. 通过 器将 五相 拍 通 电 的 机定子励 已知转子有 4个齿,步进电机的步距角是( )。 756 A. 0.6° c. 1.5° B. 1. D. 2°
5.计算机控制系统实际运行时,需要由用户自行编写( ),具有实时性、针对性、灵活性 和通用性。 A.实时软件 B.开发软件 C.系统软件 D.应用软件 6.数控机床进给系统的伺服电机属于设备的( )。 A.能源部分 B.传感部分 C.驱动部分 D.执行机构 得 分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 7.机电一体化产品不仅是人的手与肢体的延伸,还是人的感官与头脑的延伸,具有“智能 化”的特征是机电一体化与机械电气化在功能上的本质差别。 () 8.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响,因 此机械系统的阻尼比ξ取值越小越好。 () 9.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。 () 10.在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作成 本低。 11.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期, 增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。() 12.步进电动机的转动惯量越大,同频率下的起动转矩就越大。 13.直流伺服电动机的调速特性是电机转速与其输出转矩的关系。 () 14.计算机控制系统的采样周期越小,其控制精度就越高。 () 15.PLC具有完善的自诊断功能,能及时诊断出PLC系统的软件、硬件故障,并能保护故 障现场,保证了PLC控制系统的工作安全性。 () 16.需求设计是指新产品开发的整个生命周期内,从分析用户需求到以详细技术说明书的 形式来描述满足用户需求产品的过程。 757
5. 需要 ) ,具有实时性、针对性、灵活性 和通用性。 A. 件B. 发 软 C. 统软件D. 6. 控机 )。 A. 能 源 分B. C. 分D. 得分|评卷人 二、判断题(正确的打~,错误的打 X,每题 3分,共 0分) 7. 是人 肢体 与 头 化"的特征是机电一体化与机械电气化在功能上的本质差别 ( ) 8. 进行机 统结 应 性 均产 此机械系统的阻尼比 5取值越小越好 ( ) 9. 垂直 锁或 ) 本低。( 10. 滚珠 齿差式 ) 11. 用 虚 样机 样 机 增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。( ) 12. 惯量越 转矩 就越 ) 13. 速特 其输 ) 14. 其控 ) 15. PLC 有 完 善 出PLC 并 能 障现场,保证了 C控制系统的工作安全性。( ) 16. 需 求 形式来描述满足用户需求产品的过程 ( )
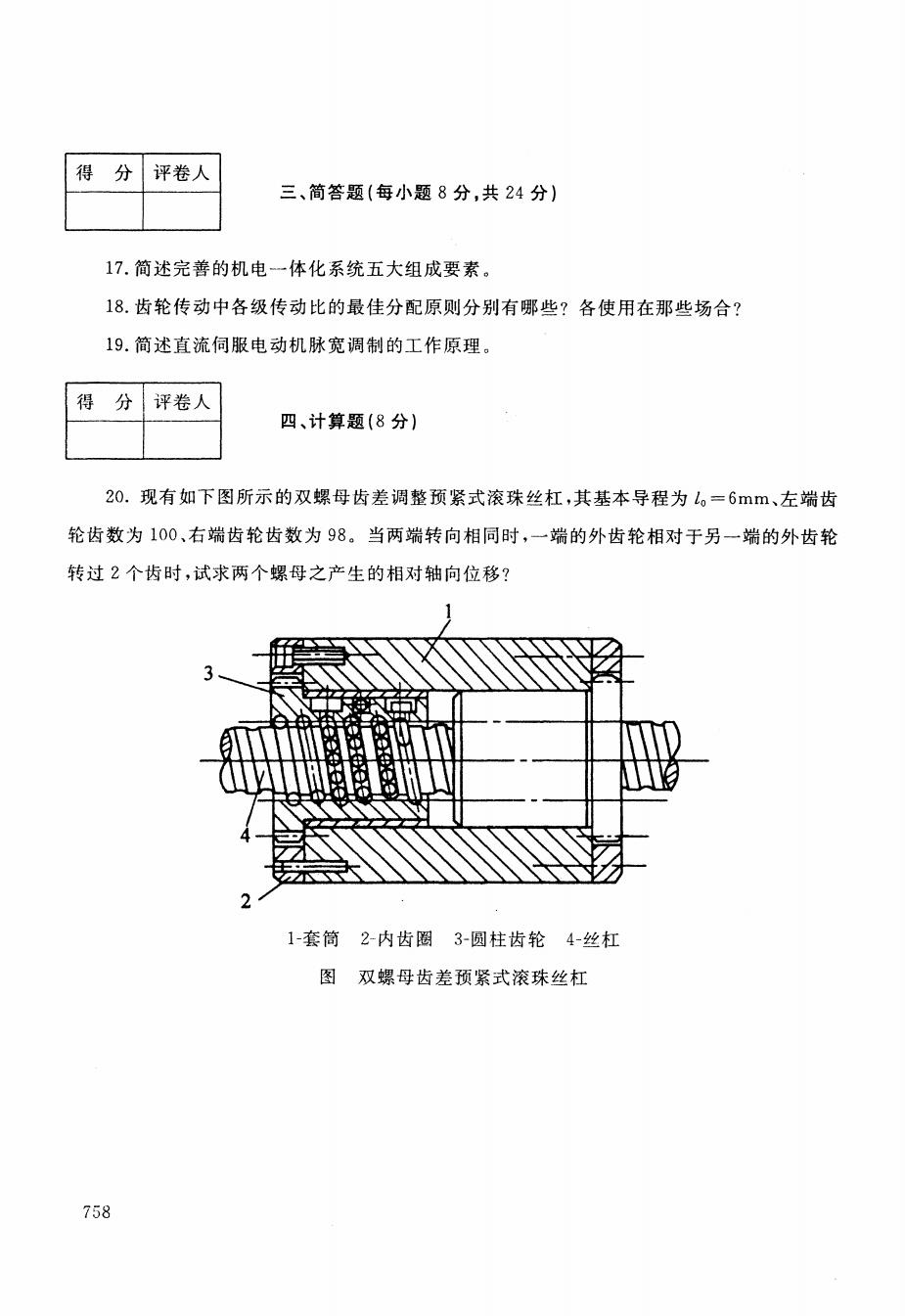
得分 评卷人 三、简答题(每小题8分,共24分) 17.简述完善的机电一体化系统五大组成要素。 18.齿轮传动中各级传动比的最佳分配原则分别有哪些?各使用在那些场合? 19.简述直流伺服电动机脉宽调制的工作原理。 得 分 评卷人 四、计算题(8分) 20.现有如下图所示的双螺母齿差调整预紧式滚珠丝杠,其基本导程为l。=6m、左端齿 轮齿数为100、右端齿轮齿数为98。当两端转向相同时,一端的外齿轮相对于另一端的外齿轮 转过2个齿时,试求两个螺母之产生的相对轴向位移? 2 1-套筒2-内齿圈3-圆柱齿轮4-丝杠 图双螺母齿差预紧式滚珠丝杠 758
得分|评卷人 三、简答:题(每小题 17. 一体 18. 最佳 有 哪 场合 19. 宽 调 制 作原理 得分 i评卷人 四、计算题 8分) 20. 式滚 导程 =6mm 轮齿数为 0、右端齿轮齿数为 齿轮 齿轮 转过 两个螺母 之 位移 3 1- 筒2 圈3- 轮4 图双螺母齿差预紧式滚珠丝杠 758

得 分 评卷人 五、综合题(14分) 21.根据下图所示气体压力传感器的原理图,分析该传感检测系统的原理组成及各部分 的作用。 4磁心 5转换电路 电总线嗣3 输出 膜盒2 1完体 气体压力传感器 759
得分|评卷人 五、综合题 4分) 21. 所示 感 器 组 成 的作用。 气体旅力传感楼 也黯 759

试卷代号:1118 中央广播电视大学2010一2011学年度第二学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2011年7月 一、单选题(每题4分,共24分) 1.B 2.A 3.B 4.C 5.D 6.C 二、判断题(每题3分,共30分) 7./ 8.× 9./ 10.× 11.× 12.× 13.× 14.× 15./ 16./ 三、简答题(每小题8分,共24分) 17.答:机电一体化系统是由机械本体、动力系统、检测传感系统、执行部件、信息处理及控 制系统五部分相互协调,共同完成所规定的目的功能。各部分通过接口及相应软件有机结合 在一起,构成内部匹配合理、外部效能最佳的完整产品。 18.答:齿轮传动中各级传动比的最佳分配原则:a.重量最小原则(结构紧凑);b.转动惯量 最小原则(快速响应);c.输出轴转角误差最小原则(精度)。 结合可行性、经济性对转动惯量、结构尺寸和传动精度提出适当要求: 要求体积小、重量轻的齿轮采用重量最轻的原则;要求运动平稳、起停频繁和动态性能好 的轮系采用最小转动惯量原则或输出轴转角误差最小原则;提高传动精度和减小回程误差为 主的轮系采用转角误差最小原则。 19.答:直流伺服电动机一般采用脉宽调制(PWM)进行调速驱动,如图示。假设输入直流 电压U,可以调节导通时间得到一定宽度的与U成比例的脉冲方波,给伺服电动机电枢回路 供电,通过改变脉冲宽度来改变电枢回路的平均电压,从而输出不同大小的电压U,使直流电 动机平滑调速。 VD U. 图PWM直流湖速驱动原理图 760
试卷代号 中央广播电视大学 1学年度第二学期"开放本科"期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2011 年7 一、单选题(每题 4分,共 4分) 二、判断题(每题 3分,共 0分) 7. 8. X 1. B 12. X 2.A 13. X 3. B 9.~ 14. X 4. C 10. X 15. 5.0 6. C 11. X 16. 三、简答题(每小题 8分,共 4分) 17. 一 体 机 械 制系统五部分相互协调,共同完成所规定的目的功能。各部分通过接口及相应软件有机结合 在一起,构成内部匹配合理、外部效能最佳的完整产品。 18. 齿 轮传 最佳 b. 最小原则(快速响应) ; c. 小原 结合可行性、经济性对转动惯量、结构尺寸和传动精度提出适当要求: 要求体积小、重量轻的齿轮采用重量最轻的原则;要求运动平稳、起停频繁和动态性能好 的轮系采用最小转动惯量原则或输出轴转角误差最小原则;提高传动精度和减小回程误差为 主的轮系采用转角误差最小原则。 19. 流伺 制(PWM) 入直 电压 ,可以调节导通时间得到一定宽度的与 U成比例的脉冲方波,给伺服电动机电枢回路 供电,通过改变脉冲宽度来改变电枢回路的平均电压,从而输出不同大小的电压 ,使直流电 动机平滑调速。 + VD 760 U -0 La J S M直 i调速驱动原理国 Uα

设开关S周期性的闭合、断开,周期是T。在一个周期内,闭合的时间是τ,断开的时间是 T一τ。若外加电源电压U为常数,则电源加到电动机电枢上的电压波形将是一个方波列,其 高度为U,宽度为τ,则一个周期内的电压平均值为: U.-FUd-jU-w 所以,当T不变时,只要连续改变τ(0~T)就可以连续的使U。由0变化到U,从而达到连 续改变电动机转速的目的。 四、计算题(8分)】 20.解:左端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/100 =0.06mm; 右端外齿轮旋转一周,螺母轴向移动6mm,则每转一个齿,螺母的轴向移动6/98 =0.0612mm; 当两端转向相同时:一端的外齿轮相对于另一端的外齿轮转过1个齿时,相对移动的轴向 距离为0.0612一0.06=0.0012(mm),所以当一端的外齿轮相对于另一端的外齿轮转过2个 齿时相对移动的轴向距离为(0.0612-0.06)*2=0.0024(mm)。 △s=n×(货-)×6=2×(g-)×6mm=2.4um 五、综合题(14分) 21.答:气体压力传感器的工作原理是膜盒2的下半部与壳体1固接,上半部通过连杆与 磁心4相连,磁心4置于两个电感线圈3中,后者接人转换电路5。该传感检测系统由敏感元 件、转换元件和基本转换电路三部分组成: (1)敏感元件。膜盒2就是敏感元件,其外部与大气压pa相通,内部感受被测压力p,当p 变化时,引起膜盒上半部移动,即输出相应的位移量。 (2)转换元件。可变电感3是转化元件,它把输入的位移量转换成电感的变化。 (3)基本转换电路。5即为转换电路。 761
设开关 S周期性的闭合、断开,周期是 T。在一个周期内,闭合的时间是 τ,断开的时间是 压U 波 形 个方 高度为 ,宽度为 τ,则一个周期内的电压平均值为: == == 所以,当 T不变时,只要连续改变 '"-' )就可以连续的使 ,从而达到连 续改变电动机转速的目的。 四、计算题 20. 动6mm 动6/100 ==0.06mm; 右端外齿轮旋转一周,螺母轴向移动 m,则每转一个齿,螺母的轴向移动 ==0.0612mm; 当两端转向相同时:一端的外齿轮相对于另一端的外齿轮转过1个齿时,相对移动的轴向 距离为 == 0012(mm) 齿 轮 齿轮转 过2 齿时相对移动的轴向距离为 == 0024(mm) 0 Ll s== n X (-.l_ -.l) X ln J飞 == 2 X ( ,,~一土) X6mm==2. 4μm 100 J ,r , ~广 五、综合题 4分) 21. 盒2 半 部 体1 磁心 4相连,磁心 4置于两个电感线圈 3中,后者接入转换电路 5。该传感检测系统由敏感元 件、转换元件和基本转换电路三部分组成: (1) 敏感 盒2 敏感 其外 气压 相 通 部 感 变化时,引起膜盒上半部移动,即输出相应的位移量 (2) 感3 是转 化 输入 移量转 (3) 761