试卷代号:1118 座位号 中央广播电视大学2012一2013学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题 2013年1月 题 号 一 二 三 四 五 总分 分 数 得 分 评卷人 一、单选题(每小题4分,共24分) 1.以下产品属于机电一体化产品的是()。 A.游标卡尺 B.移动电话 C.全自动洗衣机 D.非指针式电子表 2.为提高机电一体化机械传动系统的固有频率,应设法()。 A.增大系统刚度 B.增大系统转动惯量 C.增大系统的驱动力矩 D.减小系统的摩擦阻力 3.光栅传感器的光栅是在一块长条形的光学玻璃上密集等间距平行的刻线,刻线数为 100线/mm,经四倍细分后,记数脉冲为400,光橱位移是( )mm。 A.1 B.2 C.3 D.4 4.PWM指的是( )。 A.机器人 B.计算机集成系统 C.脉宽调制 D.可编程控制器 579
试卷代号 1 1 座位号仁口 中央广播电视大学 2 0 3学年度第一学期"开放本科"期末考试 机电一体化系统设计基础试题 2013 年1 - |分数 I I I 1 I I |得分|评卷人| I I / I- 每小 1.以下产晶属于机电-体化产品的是( )λ A.游标卡尺 B. C. 洗衣 D. 非指针 2. 械传 的 固 频率 )。 A.增大系统刚度 B. C. D. 阻力 3. 栅传感器 条形 学玻璃上 密 集 等 平行 刻 线 100 mm 记数 为400 光栅位移是 )mm A. 1 C. 3 4. PWM )。 A. C. B. 2 D. 4 B.计算机集成系统 D. 可编 579
5.以下除了(),均是由硬件和软件组成。 A,计算机控制系统 B.PLC控制系统 C.嵌入式系统 D.继电器控制系统 6.HRGP-1A喷漆机器人中的活塞式液压缸属于系统中的( )。 A.能源部分 B.传感部分 C.驱动部分 D.执行机构 得 分 评卷人 二、判断题(正确的打/,错误的打×,每题3分,共30分】 7.产品的组成零部件和装配精度高,系统的精度一定就高。 () 8.从影响滚珠螺旋传动的因素看,温度误差是影响传动精度的因素之一。 () 9.双螺母消除滚珠丝杠副轴向间隙的结构形式结构紧凑,工作可靠,调整方便,能够精确 调整。 () 10.迟滞是传感器静态特性指标之一,反映传感器输人量在正反行程中,输出输人特性曲 线的不重合度 () 11.选择传感器时,应选用精度尽可能高的传感器。 () 12.永磁型步进电动机即使其定子绕组断电也能保持一定转矩,故具有记忆能力,可用于 定位驱动。 () 13.通常,步进电机的最高连续工作频率远小于它的最高启动频率。 () 14.一般说来,全物理仿真较之计算机仿真在时间、费用和方便性上都具有明显的优点,是 一种经济、快捷与实用的仿真方法。 () 15.PLC采用扫描工作方式,扫描周期的长短仅决定于PLC的程序长短。 () 16.绿色设计是对已有的产品或技术进行分析研究,进而对该系统(产品)进行剖析、重构、 再创造的设计。 () 580
5. ) ,均是由硬件和软件组成。 A. 算机控 B.PLC C. D. 器控 6. HRGP-1A 器人 压缸 )。 A. 部分 B. 传感部分 C. 部分 D. 得分评卷人 二、判断题(正确的打--I,错误的打 X,每题 3分,共 0分} 7. 品 的 成零 一定就 ) 8. 滚珠 旋传 之一 ) 调整。( 9. 双螺 除滚 形式结构 调 整方便 能够 ) 10. 带是传 特性 传感器 量在正反行程 输人特性 线的不重合度。( ) 1 1. 传感器 可能 ) 12. 组断 保持 定转 定位驱动。( ) 13. 连续 远小 ) 14. 一般 理仿 较之 算机 费用和 便性 都具 一种经济、快捷与实用的仿真方法。( ) 15. PLC 工作方 仅决 于PLC ) 16. 术进行 重构 再创造的设计。( ) 580
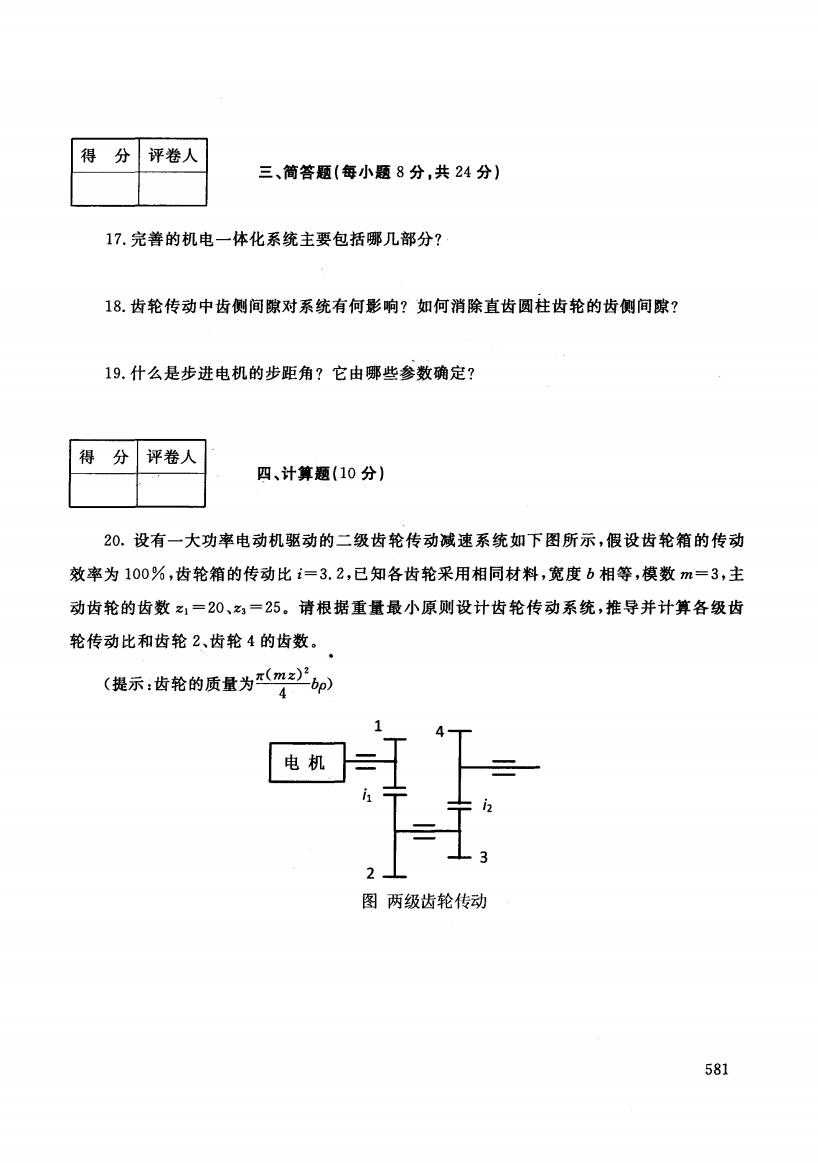
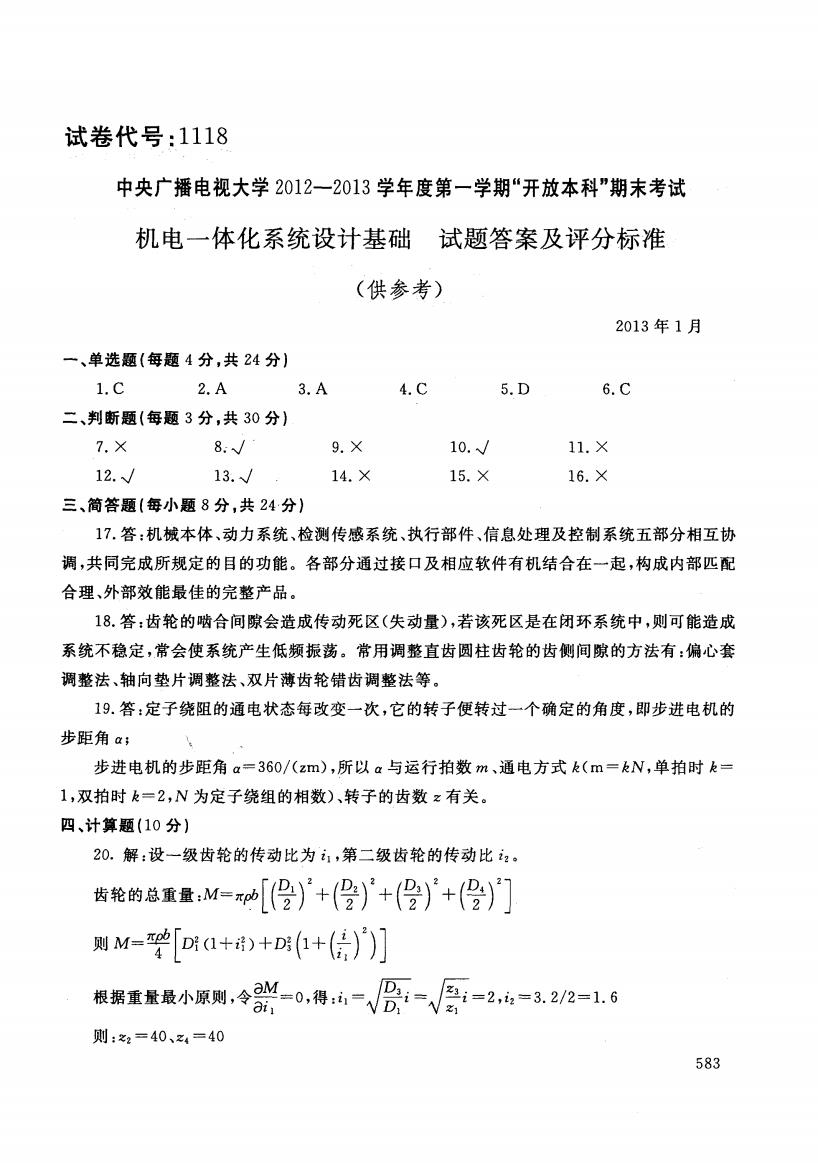
得分 评卷人 三、简答题(每小题8分,共24分) 17.完善的机电一体化系统主要包括哪几部分? 18.齿轮传动中齿侧间隙对系统有何影响?如何消除直齿圆柱齿轮的齿侧间隙? 19.什么是步进电机的步距角?它由哪些参数确定? 得 分 评卷人 四、计算题(10分) 20.设有一大功率电动机驱动的二级齿轮传动减速系统如下图所示,假设齿轮箱的传动 效率为100%,齿轮箱的传动比=3.2,已知各齿轮采用相同材料,宽度b相等,模数m=3,主 动齿轮的齿数z1=20、z=25。请根据重量最小原则设计齿轮传动系统,推导并计算各级齿 轮传动比和齿轮2、齿轮4的齿数。 (提示:齿轮的质量为》p) 电机 图两级齿轮传动 581
|得分|评卷人| I I I 三、简答题{每小题 8分,共 4分} 17. 要包括 几部 18. 轮传 统有 直齿 19. 哪些参数 |得分|评卷人| I j I 四、计算题(10分} 20. 有一大 机驱动 级齿 动减 统如下 效率为 %,齿轮箱的传动比 ,已知各齿轮采用相同材料,宽度 b相等,模数 m = ,主 动齿轮的齿数 0、 5。请根据重量最小原则设计齿轮传动系统,推导并计算各级齿 轮传动比和齿轮 2、齿轮 4的齿数。 (提示 z齿轮的质量为一丁一'- 且主 /1 2 图两级齿轮传动 581
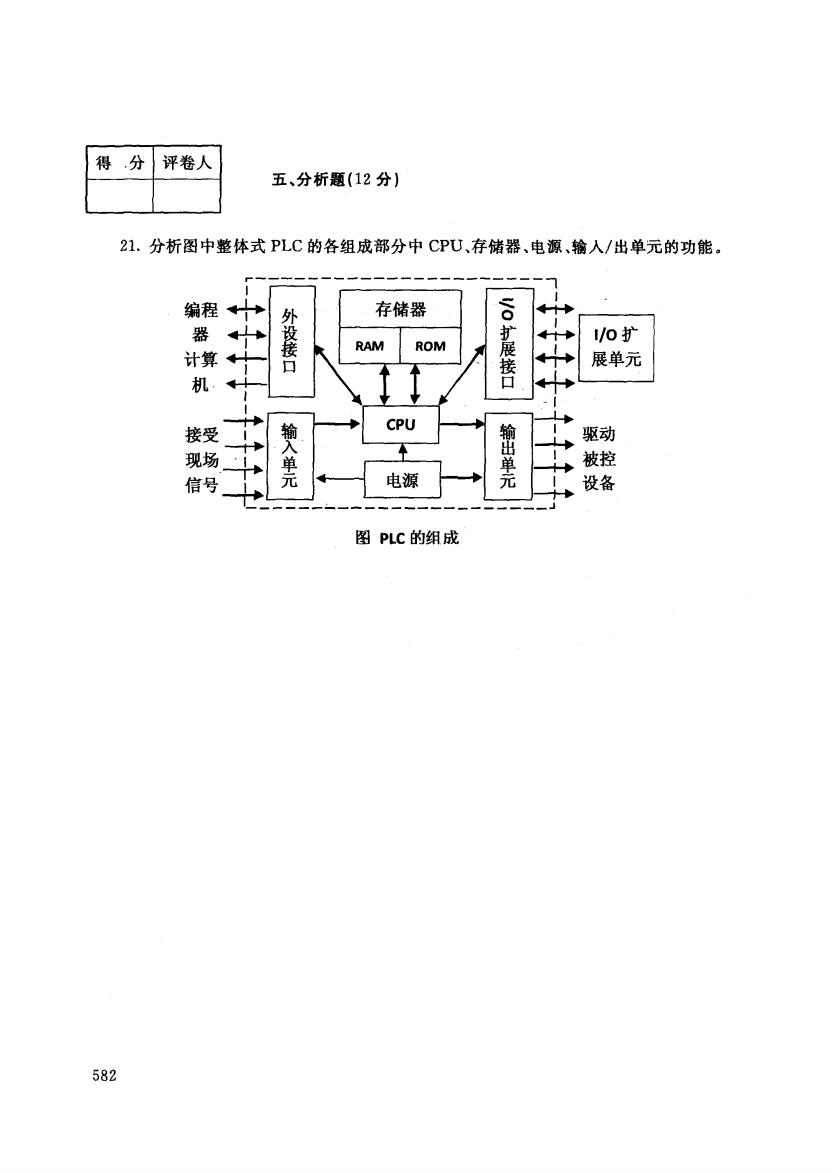
得.分 评卷人 五、分析题(12分) 21.分析图中整体式PLC的各组成部分中CPU、存储器、电源、输人/出单元的功能。 编程 存储器 外设接 /o扩 RAM ROM 0扩展接口 展单元 机 接受 CPU 输入单元 电源 输出单元 驱动 被控 设备 州 图PLC的组成 582
|得分|评卷入| I I I 五、分析题{l 2分) 1. 式PLC 各组成 中CPU 储器 功能 582
试卷代号:1118 中央广播电视大学2012一2013学年度第一学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2013年1月 一、单选题(每题4分,共24分)】 1.C 2.A 3.A 4.C 5.D 6.C 二、判断题(每题3分,共30分) 7.× 8./ 9.× 10./ 11.× 12./ 13./ 14.× 15.× 16.× 三、简答题(每小题8分,共24分) 17.答:机械本体、动力系统、检测传感系统、执行部件、信息处理及控制系统五部分相互协 调,共同完成所规定的目的功能。各部分通过接口及相应软件有机结合在一起,构成内部匹配 合理、外部效能最佳的完整产品。 18.答:齿轮的啮合间隙会造成传动死区(失动量),若该死区是在闭环系统中,则可能造成 系统不稳定,常会使系统产生低频振荡。常用调整直齿圆柱齿轮的齿侧间隙的方法有:偏心套 调整法、轴向垫片调整法、双片薄齿轮错齿调整法等。 19.答:定子绕阻的通电状态每改变一次,它的转子便转过一个确定的角度,即步进电机的 步距角a; 步进电机的步距角a=360/(zm),所以a与运行拍数m、通电方式k(m=kN,单拍时k= 1,双拍时k=2,N为定子绕组的相数)、转子的齿数z有关。 四、计算题(10分)】 20.解:设一级齿轮的传动比为1,第二级齿轮的传动比2。 齿轮的总重量:M=动[(侣)°+(受)°+(份)°+(2)门 则M=壁[Da+)+D+(信)] 根据重量最小原则,令兴-0,得=√倍√层:=2,6=8.212=1.0 则:之2=40、z4=40 583
试卷代号 1 1 中央广播电视大学 3学年度第一学期"开放本科"期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2013 年1 一、单选题{每题 4分,共 4分} 1. e 2. A 3. A 4.e 5.D 6. e 二、判断题{每题 3分,共 0分) 7. X 8;.J · 9. X 10. .J 11. X 12. .J 13. .J 14. X 15. X 16. X 三、简答题{每小题 8分,共 4分) 17. 机械 部件 及控 调,共同完成所规定的目的功能。各部分通过接口及相应软件有机结合在一起,构成内部匹配 合理、外部效能最佳的完整产品。 18. 齿轮 造成传 ,若该死区是在闭环系统中,则可能造成 系统不稳定,常会使系统产生低频振荡。常用调整直齿圆柱齿轮的齿侧间隙的方法有 z偏心套 调整法、轴向垫片调整法、双片薄齿轮错齿调整法等。 19. 定子绕 态每改变 转子 步距角们 步进电机的步距角 3 6 0 / ,所以 α与运行拍数 、通电方式 k< ,单拍时 拍 时 子绕组 四、计算题 20. →级齿轮 二级齿轮 2 。 IID I \ 2 I I D2 \ 2 I I D 3 \ 2 I I D4 \ 2l 齿轮的总重量 tτ) + t~3) + I (1 +i~) (1+(旷 根据重量最小原则,令彗 0,得 / 2 1. Oll 'V VI 'V ZI =40 =40 583
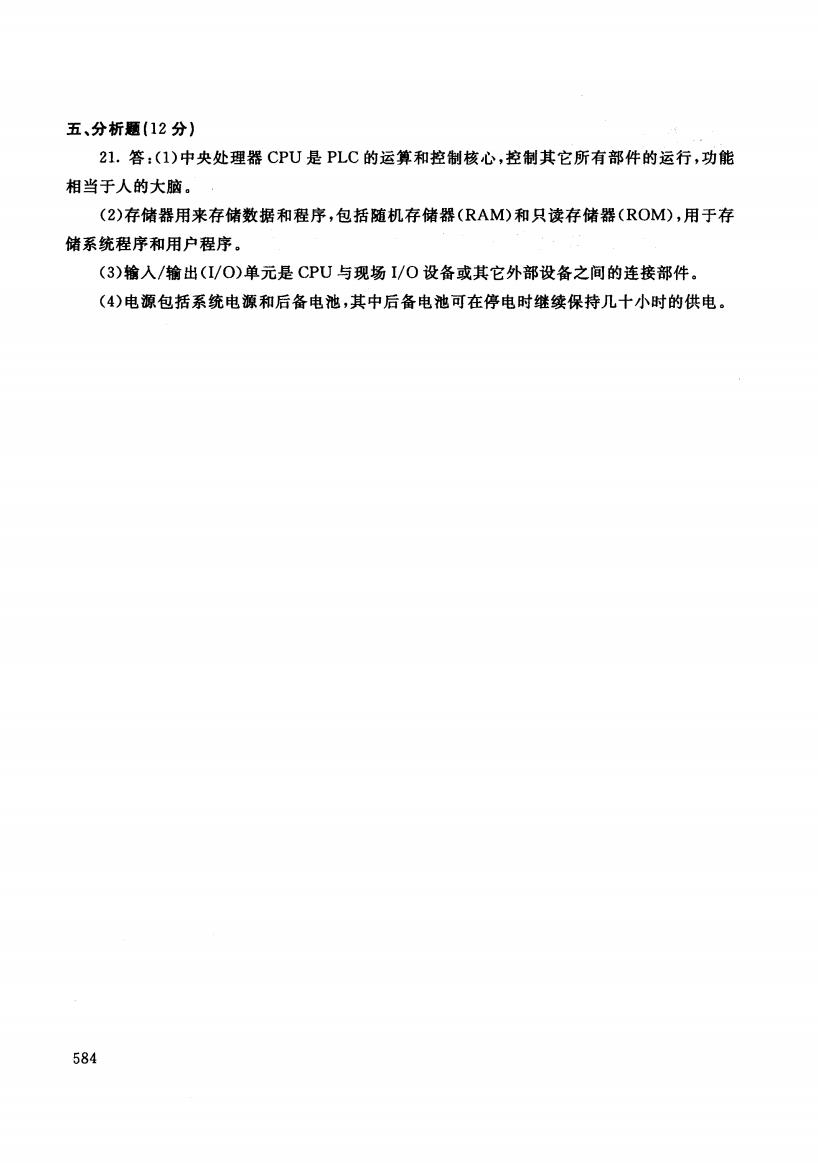
五、分析题(12分) 21.答:(1)中央处理器CPU是PLC的运算和控制核心,控制其它所有部件的运行,功能 相当于人的大脑。 (2)存储器用来存储数据和程序,包括随机存储器(RAM)和只读存储器(ROM),用于存 储系统程序和用户程序。 (3)输入/输出(I/O)单元是CPU与现场I/O设备或其它外部设备之间的连接部件。 (4)电源包括系统电源和后备电池,其中后备电池可在停电时继续保持几十小时的供电。 584
五、分析题(1 2分} 1. (1 处理器CPU 是PLC 运算 部件 相当于人的大脑。 (2) 来存 机存储器(RAM) 和 只读存 器(ROM) 储系统程序和用户程序。 (3) (I/O) 是CPU 场I/O 备或 备之 (4) 池可 时继 持几 小时 584