试卷代号:1118 座位号■■ 中央广播电视大学2013一2014学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题 2014年1月 题 号 二 三 四 五 总分 分 数 得 分 评卷人 一、单选题(每小题3分,共24分) 1.机电一体化技术是以( )部分为主体,强调各种技术的协同和集成的综合性技术。 A.自动化 B.微电子 C.机械 D.软件 2.机械传动部件的阻尼比和以下哪个因素无关?() A.粘性阻尼系数 B.系统拉压刚度系数 C.转动惯量 D.质量 3.下列哪个不是传感器的动特性?() A.幅频特性 B.临界频率 C.相频特性 D.分辨率 4.以下可对交流伺服电动机进行调速的方法是( )。 A.改变电压的大小 B.改变电动机的供电频率 C.改变电压的相位 D.改变电动机转子绕组匝数 5.积分调节器的主要作用是( )。 A.消除静差 B.加快响应 C.减小振荡 D.提高稳定性 550
试卷代号 1 1 座位号rn B.加快响应 D.提高稳定性 中央广播电视大学 4学年度第一学期"开放本科"期末考试 机电一体化系统设计基础试题 2014 年1 |题号|一|二|三|四|五|总分| |分数 I I I I I I 得分 卷人 一、单选题(每小题 3分,共 4分) 1.机电一体化技术是以( )部分为主体,强调各种技术的协同和集成的综合性技术。 A. 化B. c. 2. 机械传 部件 阻尼 无关 ( ) A. 性阻 数B. 统拉压 c. 3. 不是传感器 特性 ( ) A. 性B. c. 频特性 4. 下可 机进行 法是 )。 A. 改变 小B. c. 改变 机转子绕组 5. 要作用 )。 A. 静差 c. 减小 550

6.以下除了(),其余均是由硬件和软件组成。 A.计算机控制系统 B.继电器控制系统 C.嵌人式系统 D.PLC控制系统 7.不进行参数的变换与调整,仅作为输人/输出的直接接口的是()。 A.零接口 B.被动接口 C.主动接口 D.智能接口 8.旋转变压器是喷漆机器人电液伺服系统中的( )。 A.驱动元件 B.能量元件 C.控制元件 D.检测元件 得 分 评卷人 二、判断题(正确的打√,错误的打×,每题3分,共30分) 9.机电一体化产品不仅是人的手与肢体的延伸,还是人的感官与头脑的延伸,具有“智能 化”的特征是机电一体化与机械电气化在功能上的本质差别。() 10.传动机构的转动惯量取决于机构中各部件的质量和转速。() 11.齿轮传动系统中各级传动比的最佳分配原则中等效转动惯量最小原则是使所设计的 齿轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。() 12.传感器的静态特性是特指输人量为常量时,传感器的输出与输人之间的关系。() 13.直流伺服电动机和永磁同步交流伺服电动机都可以采用PWM控制方式进行调速控 制。() 14.半闭环系统与闭环系统的区别在于半闭环反馈信号取自系统的执行部件。() 15.一般说来,全物理仿真较之计算机仿真在时间、费用和方便性上都具有明显的优点, 是一种经济、快捷与实用的仿真方法。() 16.PLC采用扫描工作方式,扫描周期的长短决定了PLC的工作速度。() 17.反求设计是建立在概率统计基础之上,主要任务是提高产品的可靠性,延长使用寿 命,降低维修费用。() 18.在数控设备中,计算机数控装置是设备的核心部分,一般由专用计算机(或通用计算 机)、输人输出接口以及机床控制器等部分构成。() 551
6. ) ,其余均是由硬件和软件组成。 A.计算机控制系统 .继电器控制系统 C. 统D.PLC 7. 进行参数 变换与调 仅作 输入 )。 A.零接口 .被动接口 C. 口D. 8. 转变压器是喷漆 )。 A. 件B.能量 C. 件D. 元件 |得分|评卷人| I I I 二、判断题{正确的打.j,错误的打 X,每题 3分,共 0分} 9. 不仅是 肢体 延伸 与头 化"的特征是机电一体化与机械电气化在功能上的本质差别。( ) 10. 惯量取决于机构 各部件 ) 1. 轮传 级传 比 的 佳分 等效 惯量 是使 齿轮传动系统换算到该齿轮传动系统输出轴上的等效转动惯量为最小。( ) 12. 感器 特性是特 输入量为常 传感器 输人之 ) 13. 永磁 步交流伺 用PWM 方式进行 速控 制。( ) 14. 行部件 ) 15. 都具 是一种经济、快捷与实用的仿真方法。( ) 16. PLC 了PLC ) 17. 设计是 率统计基 主要 品 的 可 靠 延长 命,降低维修费用。( ) 18. 数控 是设 机)、输入输出接口以及机床控制器等部分构成。( ) 551
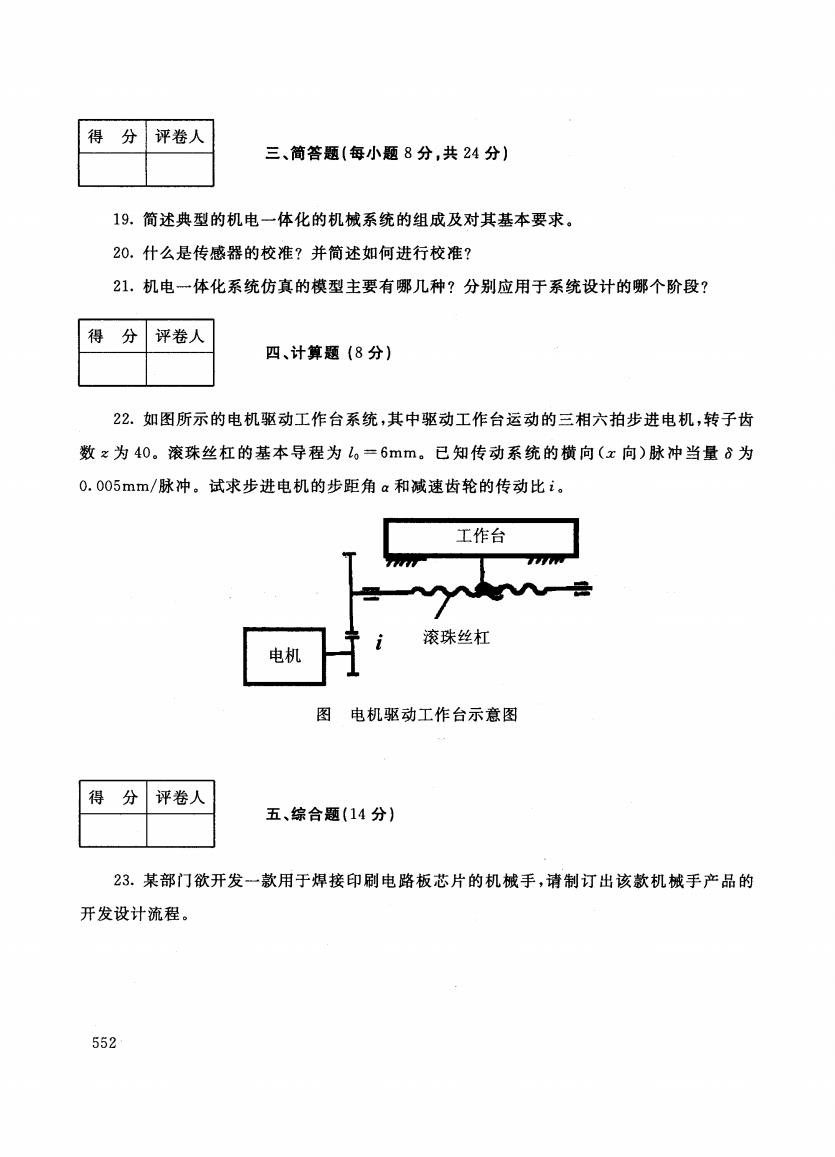
得 分 评卷人 三、简答题(每小题8分,共24分) 19.简述典型的机电一体化的机械系统的组成及对其基本要求。 20.什么是传感器的校准?并简述如何进行校准? 21.机电一体化系统仿真的模型主要有哪几种?分别应用于系统设计的哪个阶段? 得 分 评卷人 四、计算题(8分) 22.如图所示的电机驱动工作台系统,其中驱动工作台运动的三相六拍步进电机,转子齿 数x为40。滚珠丝杠的基本导程为l。=6mm。已知传动系统的横向(x向)脉冲当量8为 0.005mm/脉冲。试求步进电机的步距角a和减速齿轮的传动比i。 工作台 滚珠丝杠 电机 图 电机驱动工作台示意图 得 分 评卷人 五、综合题(14分) 23.某部门欲开发一款用于焊接印刷电路板芯片的机械手,请制订出该款机械手产品的 开发设计流程。 552
|得分|评卷人| I I I 三、简答题{每小题 19. 成及 基本要求 20. 是传感 何进行校 1. 有哪 用于 得分|评卷人 四、计算题 22. 驱动工作 六拍 步 转子齿 z为 0。滚珠丝杠的基本导程为 =6mm. 量S 0.005mm/ 步进 角α 齿轮 i 。 |电机 i 滚珠丝杠 图电机驱动工作台示意图 得分|评卷人 五、综合题 23. 欲开发 机械 款机械手 品 的 开发设计流程。 552

试卷代号:1118 中央广播电视大学2013一2014学年度第一学期“开放本科”期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2014年1月 一、选择题(每题3分,共24分)】 1.C 2.C 3.D 4.B 5.A 6.B 7.A 8.D 二、判断题(每题3分,共30分) 9.√ 10.× 11.× 12.× 13.√ 14.× 15.× 16./ 17.X 18./ 三、简答题(每小题8分,共24分) 19.答:典型的机电一体化的机械系统组成包括传动机构、导向机构、执行机构、轴系和机 座或机架。机电一体化设备对机械系统的基本要求是高精度、快速响应性和良好的稳定性, 20.答:传感器在使用前、使用中或搁置一段时间再使用时必须对其性能参数进行复测或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在一些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 21.答:机电一体化系统的仿真模型主要有:物理模型、数学模型和描述模型。当仿真模 型是物理模型时,为(全)物理仿真;是数学模型时,称之为数学(计算机)仿真。用已研制出来 的系统中的实际部件或子系统代替部分数学模型所构成的仿真称为半物理仿真。计算机仿 真、半物理仿真、全物理仿真分别应用在分析设计阶段(软件级)、部件及子系统研制阶段(软件 一硬件级)实时仿真、系统研制阶段(硬件级)实时仿真阶段。 553
试卷代号 1 1 中央广播电视大学 4学年度第一学期"开放本科"期末考试 机电一体化系统设计基础试题答案及评分标准 (供参考) 2014 年1 一、选择题{每题 3分,共 4分} I. C 5.A 2. C 6. B 3.D 7.A 4. B 8. D 二、判断题{每题 3分,共 0分) 9. .J 10. X 14. X 15. X 11. X 16. .J 12. X 17. X 13. .J 18. .J 三、简答题(每小题 8分,共 4分) 19. 组成 机构 座或机架。机电一体化设备对机械系统的基本要求是高精度、快速响应性和良好的稳定性。 20. 或搁 必须对 参数进行复测 或 做必要的调整和修正,以确保传感器的测量精度,这个复测调整过程称为校准。 为了对传感器有一个长期的、稳定的和高精度的基准,在→些测量仪器中特别是内部装有 微处理器的测量仪器中,很容易实现自动校准功能。对传感器进行校准时,需要精度比它高的 基准器,这种基准器受时间的推移和使用的磨损等因素的影响,参数会随之改变。因此对这种 基准器还要用更高精度的基准器来定期校准。 1. 真模 数学模 型 和 描述模 仿真 型是物理模型时,为(全)物理仿真;是数学模型时,称之为数学(计算机)仿真。用已研制出来 的系统中的实际部件或子系统代替部分数学模型所构成的仿真称为半物理仿真。计算机仿 真、半物理仿真、全物理仿真分别应用在分析设计阶段(软件级)、部件及子系统研制阶段(软件 一硬件级)实时仿真、系统研制阶段(硬件级)实时仿真阶段。 553
四、计算题(8分) 22.解:(1)步进电机的步距角: a=360°=360° x·m40X6=1.5° (2)减速齿轮的传动比: i9.623-5 五、综合题(14分) 23.答:机电一体化系统的主要设计流程分为五个阶段:产品规划、概念设计、详细设计、 设计实施和设计定型阶段。 第一阶段:产品规划阶段。进行需求分析和需求设计,以明确设计任务。 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数:3自由度。 使用环境要求:生产线。 第二阶段:概念设计阶段。在功能分析的基础上,优化筛选取得较理想的工作原理方案。 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程图。该阶段的工 作量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装图和零件图的绘 制。 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产,试销。 554
四、计算题 8分} 22. (1 360° 360 α= 1. z • m 40X 6 (2) 减速齿 := E:: ι360°/α3600/1. 5° v 五、综合题 14分} 23. 设计 概念设计 设计 设计实施和设计定型阶段。 第一阶段:产品规划阶段。进行需求分析和需求设计,以明确设计任务。 机械手的用途:焊接芯片。 工作方式:手动、自动方式。 主要技术参数 3自由度。 使用环境要求:生产线。 第二阶段:概念设计阶段。在功能分析的基础上,优化筛选取得较理想的工作原理方案。 第三阶段:详细设计阶段。对各功能模块进行细部设计,绘制相应的工程圈。该阶段的工 作量既包括机械、电气、电子、控制与计算机软件等系统的设计,又包括总装图和零件图的绘 制。 第四阶段:设计实施阶段。首先根据机械、电气图纸和算法文件,制造、装配和编制各功能 模块;然后进行模块的调试;最后进行系统整体的安装调试,复核系统的可靠性及抗干扰性。 第五阶段:设计定型阶段。对调试成功的系统进行工艺定型,整理设计资料。小批量生 产,试销。 554