试卷代号:1118 座位■■ 中央广播电视大学2008一2009学年度第一学期“开放本科”期末考试 机电一体化系统设计基础试题 2009年1月 题号 一 二 三 四 五 六 总 分 分 数 得分 评卷人 一、判断题(每小题2分,共20分,判断下列所述是否正确,正确填入 “十”号,错误则填“一”号)】 1.数控机床中的计算机属于机电一体化系统的控制及信息处理单元,而电机和主轴箱则 属于系统的驱动部分。() 2.驱动元件的选择及动力计算是机电一体化产品开发过程理论分析阶段的工作之一。 () 3.通常,机械传动系统的基本固有频率应高于电气驱动部件的固有频率2一3倍。 () 4,在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作成 本低。() 5.驱动装置中同一环节的误差,其高频分量和低频分量,对系统输出精度的影响程度可 能是不同的。() 6.直流伺服电机的驱动电路中,由于脉宽调制放大器的管耗大,因此多用于小功率系统。 () 7.在工控机系统的总线中,控制总线的功能是确定总线上信息流的时序。() 8.TTL电平接口能用于输出指示灯的控制,但不能用于驱动带电气隔离的继电器。 () 760
试卷代号:1118 座位号[二口 中央广播电视大学2008一20o9学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题 2009年 1月 题 号 -- .山 二 四 五 六 总 分 分 数 得 分 评卷人 一、判断题(每小题 2分,共20 分,判断下列所述是否正确,正确填入 “十”号.错误则填“一”号) 1.数控机床中的计算机属于机电一体化系统的控制及信息处理单元,而电机和主轴箱则 属于系统的驱动部分。( ) 2.驱动元件的选择及动力计算是机电一体化产品开发过程理论分析阶段的工作之一。 ( ) 3.通常,机械传动系统的基本固有频率应尚于电气驱动部件的固有频率 2一3倍。 ( ) 4.在滚珠丝杠螺母间隙的调整结构中、齿差式调隙机构的精度较高,且结构简单,制作成 本低。( ) 5.驱动装置中同一环节的误差,其高频分量和低频分量,对系统输出精度的影响程度可 能是不同的。( ) 6.直流伺服电机的驱动电路中,由于脉宽调制放大器的管耗大,因此多用于小功率系统。 7.在工控机系统的总线中,控制总线的功能是确定总线上信息流的时序。( ) 8.TTIJ电平接 口能用于输 出指示灯的控制,但不能用于驱动带电气隔离的继电器。 760
9.迟滞是传感器静态特性指标之一,反映传感器输入量在正反行程中,输出输入特性曲 线的不重合度。() 10.绝对式光电编码器能用于角位置测量,也能用于角速度测量。() 得 分 评卷人 二、选择题(每小题4分,共20分) 1.HRGP-1A喷漆机器人中的分离活塞式油缸属于系统中的( )。 A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 2.机械系统的刚度对系统的主要影响表现为( )等方面。 A.固有频率、响应速度、惯量 B.固有频率、精度、稳定性 C.摩擦特性、响应速度、稳定性 D.摩擦特性、精度、惯量 3.闭环控制的驱动装置中,丝杠螺母机构位于闭环之外,所以它的()。 A.回程误差不影响输出精度,但传动误差影响输出精度 B.传动误差不影响输出精度,但回程误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 4.()又称为力矩电动机,在位置控制方式的伺服系统中,它可在堵转状态下工作。 A.永磁式直流伺服电机 B.电磁式直流伺服电机 C.永磁式交流同步伺服电机 D.笼型交流异步伺服电机 5.幅频特性和相频特性是模拟式传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 761
9。迟滞是传感器静态特性指标之一,反映传感器输入量在正反行程 中,输 出输入特性曲 线的不重合度。 10.绝对式光 电编码器能用于角位置测量,也能用于角速度测量。 得 分 评卷人 二、选择题 (每小题 4分.共 20分) .HRGP-lA喷漆机器人中的分离活塞式油缸属于系统 中的( A.能源部分 B.测试传感部分 C.驱动部分 D.执行机构 2.机械系统的刚度对系统的主要影响表现为( )等方面。 A.固有频率 、响应速度、惯量 B.固有频率、精度、稳定性 C.摩擦特性 、响应速度、稳定性 D.摩擦特性、精度 、惯量 3.闭环控制的驱动装置中,丝杠螺母机构位于闭环之外 ,所以它的( )。 A.回程误差不影响输出精度 ,但传动误差影响输 出精度 B.传动误差不影响输出精度,但回程误差影响输出精度 C.回程误差和传动误差都不会影响输出精度 D.回程误差和传动误差都会影响输出精度 4.( )又称为力矩 电动机 ,在位置控制方式的伺服系统中,它可在堵转状态下工作。 A.永磁式直流伺服电机 B.电磁式直流伺服电机 C.永磁式交流同步伺服电机 D.笼型交流异步伺服电机 5.幅频特性和相频特性是模拟式传感器的( )。 A.静态特性指标 B.动态特性指标 C.输入特性参数 D.输出特性参数 761
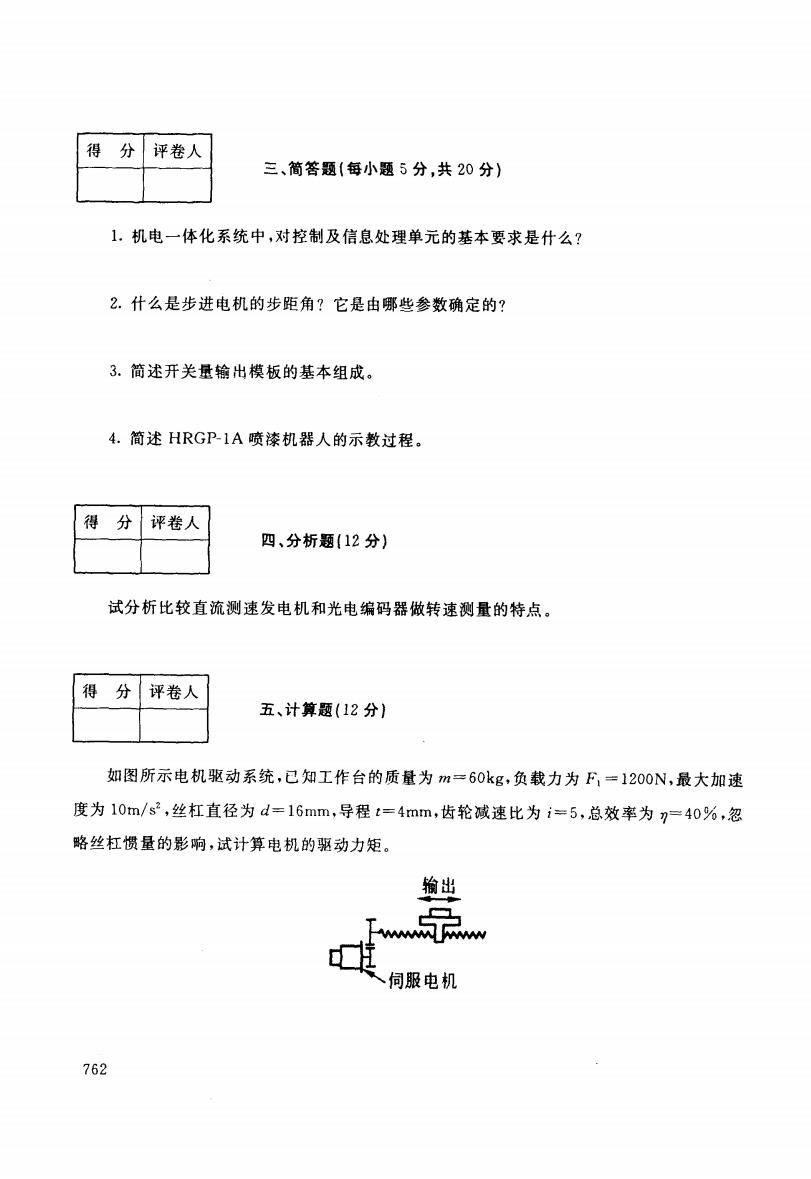
得分评卷人 三、简答题(每小题5分,共20分)】 1.机电一体化系统中,对控制及信息处理单元的基本要求是什么? 2.什么是步进电机的步距角?它是由哪些参数确定的? 3.简述开关量输出模板的基本组成。 4.简述HRGP-1A喷漆机器人的示教过程。 得分 评卷人 四、分析题(12分) 试分析比较直流测速发电机和光电编码器做转速测量的特点。 得分 评卷人 五、计算题(12分) 如图所示电机驱动系统,已知工作台的质量为m=60kg,负载力为F,=1200N,最大加速 度为10m/s2,丝杠直径为d=16mm,导程t=4mm,齿轮减速比为i=5,总效率为?=40%,忽 略丝杠惯量的影响,试计算电机的驱动力矩。 输出 伺服电机 762
得 分 评卷人 三、简答题(每小题 5分,共 20分) 1.机电一体化系统中,对控制及信息处理单元的基本要求是什么? 2.什么是步进电机的步距角?它是由哪些参数确定的? s.简述开关量输 出模板的基本组成。 4.简述 HRGP-IA喷漆机器人的示教过程。 得 分 评卷人 四、分析题(12分) 试分析比较直流测速发电机和光电编码器做转速测量的特点。 得 分 评卷人 五、计算题 (12分) 如图所示电机驱动系统,已知工作台的质量为 m= 60kg,负载力为 F, =1200N,最大加速 度为10 m/ 8z,丝杠直径为d= l.6mm,导程t=4mm,齿轮减速比为i=5,总效率为9= 40 ,忽 略丝杠惯量的影响 ,试计算 电机的驱动力矩。 输出 762
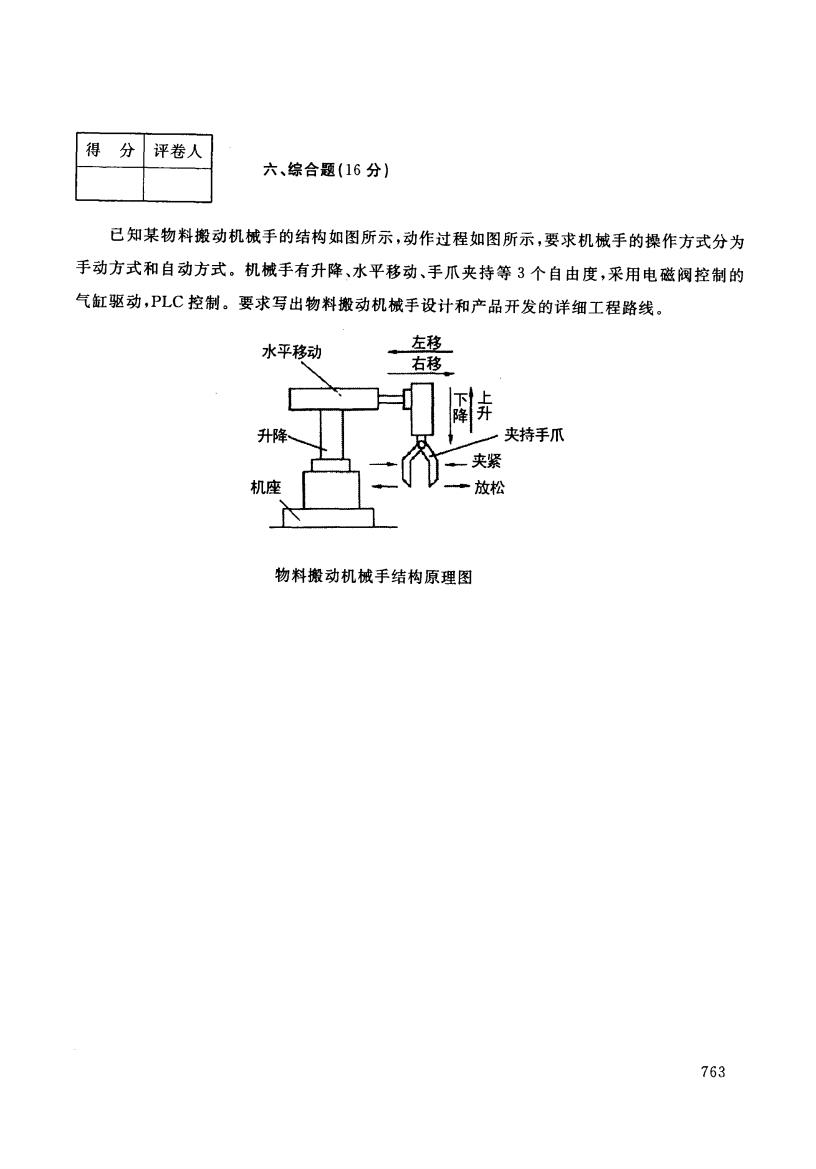
得分 评卷人 六、综合题(16分) 已知某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为 手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的 气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。 水平移动 左移 右移 上 升降 夹持手爪 夹紧 机座 放松 物料搬动机械手结构原理图 763
得 分 评卷人 六、综合题(16分) 已知某物料搬动机械手的结构如图所示 ,动作过程如图所示 ,要求机械手的操作方式分为 手动方式和自动方式。机械手有升降、水平移动、手爪夹持等 3个 自由度,采用电磁阀控制的 气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。 水平移动 .左移 夹持手爪 机座 物料搬动机械手结构原理图 763
试卷代号:1118 中央广播电视大学2008一2009学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考)》 2009年1月 一、判断题(每小题2分,共20分】 1.- 2.十 3.+ 4.- 5.+ 6.- 7.+ 8.- 9.+ 10.- 二、选择题(每小题4分,共20分) 1.C 2.B 3.D 4.A 5.B 三、简答题(每题5分,共20分)】 1.答:机电一体化系统中,对控制及信息处理单元的基本要求:信息处理速度和可靠性, 增强抗干扰能力,完善系统自诊断功能,实现信息处理智能化和小型化,轻量,标准化等。 2.答:光进电机在每输人一个电脉冲信号,转子所转过的角度称为步距角。它由步进电 机的相数、电机转子的齿数和电机的通电方式所决定。 3.答:开关童输出模板的基本组成为:STD总线信号、输出端口译码控制、输出数据锁存、 输出信号调理电路、负载。 4,答:示教过程由工作人员用手操纵操作机构的关节和手腕,根据喷漆工件表面的形状 进行示教操作,此时中央处理器通过反馈元件(旋转变压器)将示教过程中测试的参数存入存 储器,即把示教过程执行机构的空间轨迹记录下来。 四、分析题(12分) 解答:直流测速发电机由永久磁铁与感应线圈组成,用电枢获取速度信号。它具有灵敏度 高、结构简单等特点,常用于高精度低速伺服系统,也可与永磁式直流电动机组成低速脉宽调 速系统。直流测速发电机的输出信号是与输人轴的转速成正比的直流电压信号,信号幅度大, 信号调理电路简单。由于输出电压信号有波纹,一般需要配置滤波电路。 光电编码器(增量式)主要由旋转孔盘和光电器件组成。它具有体积小、使用方便、测量精 764
试卷代号:1118 中央广播电视大学2008-2009学年度第一学期“开放本科”期末考试 机电一体化系统设计基础 试题答案及评分标准 (供参考) 2009年 1月 一、判断题(每小题 2分.共 20分) 1.一 2.十 3.十 4 一 5.+ 6.一 7.+ 8.一 9.十 10.一 二、选择题(每小题 4分,共 20分) 1. C 2. B 3. D 4. A 5. B 三、简答题(每题 5分,共 20分) 1.答:机电一体化系统中,对控制及信息处理单元的基本要求:信息处理速度和可靠性, 增强抗干扰能力,完善系统自诊断功能,实现信息处理智能化和小型化,轻量,标准化等。 2一答:步进电机在每输人一个电脉冲信号,转子所转过的角度称为步距角。它由步进电 机的相数、电机转子的齿数和电机的通电方式所决定。 3.答:开关量输出模板的基本组成为:STD总线信号、输出端口译码控制、输出数据锁存、 输 出信号调理电路 、负载。 4.答:示教过程由工作人员用手操纵操作机构的关节和手腕 ,根据喷漆工件表面的形状 进行示教操作 ,此时 中央处理器通过反馈元件(旋转变压器)将示教过程 中测试 的参数存入存 储器,即把示教过程执行机构的空间轨迹记录下来。 四、分析题【12分 ) 解答:直流测速发电机由永久磁铁与感应线圈组成,用电枢获取速度信号。它具有灵敏度 高、结构简单等特点,常用于高精度低速伺服系统,也可与永磁式直流电动机组成低速脉宽调 速系统。直流测速发电机的输出信号是与输入轴的转速成正比的直流电压信号,信号幅度大, 信号调理 电路简单。由于输出电压信号有波纹 ,一般需要配置滤波电路。 光电编码器(增量式)主要由旋转孔盘和光电器件组成。它具有体积小、使用方便、测量精 764
度高等特点,常与直流电机配合使用构成脉宽调速系统。增量式光电编码器输出的是与转角 成比例的增量脉冲信号,可以通过脉冲计数获得角位置信号,也可以定时取样脉冲数的增量实 现角速度测量。因此,可以同时测量转角和转速。 五、计算题(12分) 解:(1)计算负载力 负载力由外负载力、惯性负载力两部分构成 外负载力 F1=1200N 惯性负载力F。 Fm=m·a=60X10=600N (2)电机上的负载力矩为 t ·(F+F)·⊥ =1.4×10-3 5 2π ·(1200+600)·。4」 =0.57Nm 六、综合题(16分)】 解:系统设计的详细工程路线: (1)确定目标及技术规范: 机械手的用途:物料搬运。 工作方式:手动、自动方式。 主要技术参数:3自由度。 使用环境要求:生产线。 (2)可行性分析 收集资料、市场分析、可行性分析、技术经济性分析。 (3)总体方案设计 机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。 (4)总体方案的评审、评价 (5)理论分析阶段 机构运动学模型、作业空间分析;机构的力学计算;驱动元件的选择、动力计算;传感器选 择、精度分析;建立控制模型、仿真分析。 765
度高等特点,常与直流电机配合使用构成脉宽调速系统。增量式光电编码器输出的是与转角 成比例的增量脉冲信号,可以通过脉冲计数获得角位置信号,也可以定时取样脉冲数的增量实 现角速度测量 。因此 ,可以同时测量转角和转速。 五、计算题 (12分) 解:(1)计算负载力 负载力 由外负载力 、惯性负载力两部分构成 外负载力 F, =1200N 惯性负载力 Fm Fm=m " +=60 X 10=600N (2)电机上的负载力矩为 二 _ 1 t ,。 .。 、 1 I m 一 二 .只一 ’l厂1一针r-),一 z 乙7r 一 刀 一, 4X 10一3 2兀 ,,n八八 .。__、 1 l1ZUUrt ouu) 一:一-,. 0. 4 1 -- -5 = 0. 57Nm 六、综合题 (16分 ) 解 :系统设计的详细工程路线 : (1)确定 目标及技术规范 : 机械手的用途 :物料搬运 。 工作方式 :手动 、自动方式 。 主要技术参数:3自由度 。 使用环境要求 :生产线 。 (2)可行性分析 收集资料 、市场分析、可行性分析、技术经济性分析 。 (3)总体方案设计 机械手总体结构方案设计,制定研制计划;开发经费概算;开发风险分析。 (4)总体方案的评审、评价 (5)理论分析阶段 机构运动学模t4、作业空间分析;机构的力学汁算;驱动元件的选择、动力计算;传感器选 择 、精度分析;建立控制模型 、仿真分析。 765
(6)详细设计 包括系统总体设计,业务的划分:控制系统设计;程序设计:后备系统设计;设计说明书、使 用说明书。 (7)详细设计方案评价 (8)试制样机 机械本体、动力驱动系统、供电系统、控制系统、传感器、检测系统。 (9)机械手样机的实验测试 调试控制系统、控制性能测试、功能测试、精度、工作空间测试、动态指标测试、作业试验。 (10)技术评价与审定 对样机及其性能进行综合评价,提供改进意见,对不满意的部分进行修改,直至样机合格 后方可进入下一步骤。 (11)小批量生产。 (12)试销。 (13)正常生产。 (14)销售。 766
(6)详细设计 包括系统总体设计,业务的划分;控制系统设计;程序设计;后备系统设计 ;设计说明书、使 用说明书。 (7)详细设计方案评价 (8)试制样机 机械本体、动力驱动系统、供电系统、控制系统、传感器、检测系统。 (9)机械手样机的实验测试 调试控制系统、控制性能测试、功能测试、精度、工作空间测试、动态指标测试、作业试验。 (10)技术评价与审定 对样机及其性能进行综合评价,提供改进意见,对不满意的部分进行修改,直至样机合格 后方可进人下一步骤。 (11)小批量生产。 (12)试销。 (13)正常生产。 (14)销售。 766