试卷代号:2432 座位号■ 国家开放大学(中央广播电视大学)2014年秋季学期“开放专科”期末考试 数控机床电气控制 试题 2015年1月 题号 二 三 四 总 分 分数 得 分 评卷人 一、单选题(每小题3分,共54分) 1.位置检测装置能检测的最小位置变化量称作分辨率。位置检测装置的分辨率应适当 )机床加工精度。 A.高于 B.低于 C.等于 2.( )一般要在两点间移动的同时进行加工,所以不仅要求有准确的定位功能,还要求 从一点到另一点之间按直线规律运动,而且对运动的速度也要进行控制。 A.直线控制的数控机床 B.轮廓控制的数控机床 C.点位控制的数控机床 3.由于()存在着一些固有的缺点(比如,有电刷,限制了转速的提高,而且结构复杂, 价格贵),使其应用范围受到限制。 A.直流伺服电动机 B.交流伺服电动机 C.步进电动机 4.( )又称主轴准停控制,即当主轴停止时能控制其停在固定位置。 A.开环控制 B.主轴定向控制 C.辅助控制 1429
试卷代号 :2432 座位号仁口 国家开放大学(中央广播电视大学)2014 年秋季学期"开放专科"期末考试 数控机床电气控制 试题 2015 E J j 一、单选题{每小题 分,共 54 分} 1.位置检测装置能检测的最小位置变化量称作分辨率。位置检测装置的分辨率应适当 ( )机床加工精度。 A. 高于 B. 低于 c.等于 2. ( )一般要在两点间移动的同时进行加工,所以不仅要求有准确的定位功能,还要求 从一点到另一点之间按直线规律运动,而且对运动的速度也要进行控制。 A. 直线控制的数控机床 B. 轮廓控制的数控机床 c.点位控制的数控机床 3. 由于( )存在着一些固有的缺点(比如,有电刷,限制了转速的提高,而且结构复杂, 价格贵) ,使其应用范围受到限制。 A. 直流伺服电动机 B.交流伺服电动机 C. 步进电动机 4. ( )又称主轴准停控制,即当主轴停止时能控制其停在固定位置。 A. 开环控制 c.辅助控制 B.主轴定向控制 1429
5.采用安装在电机或丝杠轴端的回转型检测元件测量机床直线位移的检测方法叫做 A.绝对测量 B.直接测量 C.间接测量 6.按照电动机学原理,当( )的定子三相绕组接通三相交流电源时,就会产生旋转磁 场。 A.交流电动机 B.直流电动机 C.步进电动机 7.( )是各种PLC通用的一种图形编程语言,在形式上类似于继电器控制电路。它直 观、易懂,是目前应用最多的一种编程语言。 A,语句表 B.梯形图 C.功能表图 8.目前,数控机床主要采用变频调速等先进交流调速技术,由电动机学基本原理可知,该 交流调速技术通过改变()进行调速。 A.定子供电频率 B.磁极对数 C.定子供电电压 9.位置检测装置输出信号的变化量相对于输入信号变化量的比值为()。 A.灵敏度 B.测量范围 C.零漂 10.用来表明各种电气元件在机械设备上和电气控制柜中的实际安装位置电气控制系统 图是()。 A.电气原理图 B.电器元件布置图 C.电器安装接线图 11.数控机床的进给运动是由( )完成的。 A.进给伺服系统 B.位置检测装置 C.可编程序控制器 12.()是数控系统的核心。 A.进给伺服系统 B.数控装置 C.可编程序控制器 1430
场。 5. 采用安装在电机或丝杠轴端的回转型检测元件测量机床直线位移的检测方法叫做 A. 绝对测量 c.间接测量 B. 直接测量 ( ) 6. 按照电动机学原理,当( )的定子三相绕组接通三相交流电源时,就会产生旋转磁 A. 交流电动机 B. 直流电动机 c.步进电动机 7. ( )是各种 PLC 通用的一种图形编程语言,在形式上类似于继电器控制电路。它直 观、易懂,是目前应用最多的一种编程语言。 A. 语句表 B. 梯形图 c.功能表图 8. 目前,数控机床主要采用变频调速等先进交流调速技术,由电动机学基本原理可知,该 交流调速技术通过改变( )进行调速。 A. 定子供电频率 B. 磁极对数 C. 定子供电电压 9. 位置检测装置输出信号的变化量相对于输入信号变化量的比值为( )。 A. 灵敏度 B. 测量范围 c.零漂 10. 用来表明各种电气元件在机械设备上和电气控制柜中的实际安装位置电气控制系统 图是( )。 A. 电气原理图 B. 电器元件布置图 c.电器安装接线图 1.数控机床的进给运动是由( )完成的。 A. 进给伺服系统 B. 位置检测装置 c.可编程序控制器 12. ( )是数控系统的核心。 l430 A. 进给伺服系统 c.可编程序控制器 B.数控装置
13.某数控机床的数控装置只要求能够精确地控制从一个坐标点到另一个坐标点的定位 精度,而不管是按什么轨迹运动,在移动过程中不进行任何加工。那么这是属于()。 A.直线控制的数控机床 B.轮廓控制的数控机床 C.点位控制的数控机床 14.数控装置在硬件基础上必须有相应的系统软件来指挥和协调硬件的工作,两者缺一 不可。数控装置的软件由( )组成, A.控制软件 B.管理软件和控制软件两部分 C.管理软件 15.( )不但能用于正常工作时不频繁接通和断开的电路,而且当电路发生过载、短路 或失压等故障时,能自动切断电路,有效地保护串接在它后面的电气设备。 A.刀开关 B.低压断路器 C.组合开关 16.电流继电器与电压继电器在结构上的区别主要是()不同。电流继电器的线圈匝 数少、导线粗,与负载串联以反映电路电流的变化。电压继电器的线圈匝数多、导线细,与负载 并联以反映其两端的电压。 A.线圈 B.衔铁 C.触点 17.数控装置是整个数控系统的核心,按CNC装置中微处理器的个数可以分为单微处理 器结构和( )。 A.专用型结构 B.功能模块式结构 C.多微处理器结构 18.位置检测元件不直接安装在进给坐标的最终运动部件上,而是中间经过机械传动部 件的位置转换(称为间接测量),亦即,坐标运动的传动链有一部分在位置闭环以外,这种伺服 系统称为( )。 A.开环同服系统 B.半闭环系统 C.闭环伺服系统 1431
13. 某数控机床的数控装置只要求能够精确地控制从一个坐标点到另一个坐标点的定位 精度,而不管是按什么轨迹运动,在移动过程中不进行任何加工。那么这是属于( )。 A. 直线控制的数控机床 B. 轮廓控制的数控机床 C. 点位控制的数控机床 14. 数控装昼在硬件基础上必须有相应的系统软件来指挥和协调硬件的工作,两者缺一 不可。数控装置的软件由)组成。 A. 控制软件 B.管理软件和控制软件两部分 c.管理软件 15. ( )不但能用于正常工作时不频繁接通和断开的电路,而且当电路发生过载、短路 或失压等故障时,能自动切断电路,有效地保护串接在它后面的电气设备。 A. 刀开关 c.组合开关 B. 低压断路器 16. 电流继电器与电压继电器在结构上的区别主要是( )不同。电流继电器的线圈臣 数少、导线粗,与负载串联以反映电路电流的变化。电压继电器的线圈匣数多、导线细,与负载 并联以反映其两端的电压。 A.线圈 B. 衔铁 c.触点 17. 数控装置是整个数控系统的核心,按 CNC 装置中微处理器的个数可以分为单微处理 器结构和)。 A. 专用型结构 B. 功能模块式结构 c.多微处理器结构 18. 位置检测元件不直接安装在进给坐标的最终运动部件上,而是中间经过机械传动部 件的位置转换(称为间接测量) ,亦即,坐标运动的传动链有一部分在位置闭环以外,这种伺服 系统称为( )。 A. 开环伺服系统 C. 闭环伺服系统 B. 半闭环系统 1431
得分 评卷人 二、判断题(对认为正确的题标注“/”,错题标注“×”;每小题2分、 共20分) 19.中间继电器实际上也是一种电压继电器,只是它具有数量较多、容量较大的触点,起 到中间放大的作用。() 20.由电动机学基本原理可知,交流电动机的同步转速与定子供电频率无关。() 21.语句表又叫做指令表,是各种PLC通用的一种图形编程语言,在形式上类似于继电 器控制电路。() 22.数控机床加工精度,在很大程度上取决于数控机床位置检测装置的精度。() 23.PLC内部可以看作是由许多“硬继电器”等逻辑部件组成的。() 24.常用的位移执行机构有步进电机、直流伺服电机和交流伺服电机。() 25.直接起动是一种简单、可靠、经济的起动方式,也适合于较大容量(大于10KW)的电 动机。() 26.绝对式位置检测是:每个被测点的位置都从一个固定的零点算起。() 27.数控机床位置检测装置的分辨率与数控机床的分辨率精度是相同的。() 28.主轴定向控制又称主轴准停控制,即当主轴停止时能控制其停在固定位置,对M06 和M19指令有效。( 得 分 评卷人 三、简答题(每小题6分,共12分) 29.正弦波脉宽调制(SPWM)变频器采用的重要理论基础是什么? 30.数控机床控制系统的基本组成包括哪几部分? 1432
|得分|评卷人| | 二、判断题(对认为正确的题标注 "~"I 错题标注 "X"; 每小题 分、 20 分) 19. 中间继电器实际上也是一种电压继电器,只是它具有数量较多、容量较大的触点,起 到中间放大的作用。( ) 20. 由电动机学基本原理可知,交流电动机的同步转速与定子供电频率无关。( ) 1.语句表又叫做指令表,是各种 PLC 通用的一种图形编程语言,在形式上类似于继电 器控制电路。( ) 22. 数控机床加工精度,在很大程度上取决于数控机床位置检测装置的精度。( ) 23. PLC 内部可以看作是由许多"硬继电器"等逻辑部件组成的。( ) 24. 常用的位移执行机构有步进电机、直流伺服电机和交流伺服电机。( ) 25. 直接起动是一种简单、可靠、经济的起动方式,也适合于较大容量(大于 10KW) 的电 动机。( ) 26. 绝对式位置检测是:每个被测点的位置都从一个固定的零点算起。( ) 27. 数控机床位置检测装置的分辨率与数控机床的分辨率精度是相同的。( ) 28. 主轴定向控制又称主轴准停控制,即当主轴停止时能控制其停在固定位置,对 M06 M19 指令有效。( ) |得分|评卷人| 三、简答题(每小题 分,共 12 分} |||… 29. 正弦波脉宽调制 (SPWM) 变频器采用的重要理论基础是什么? 30. 数控机床控制系统的基本组成包括哪几部分? 1432
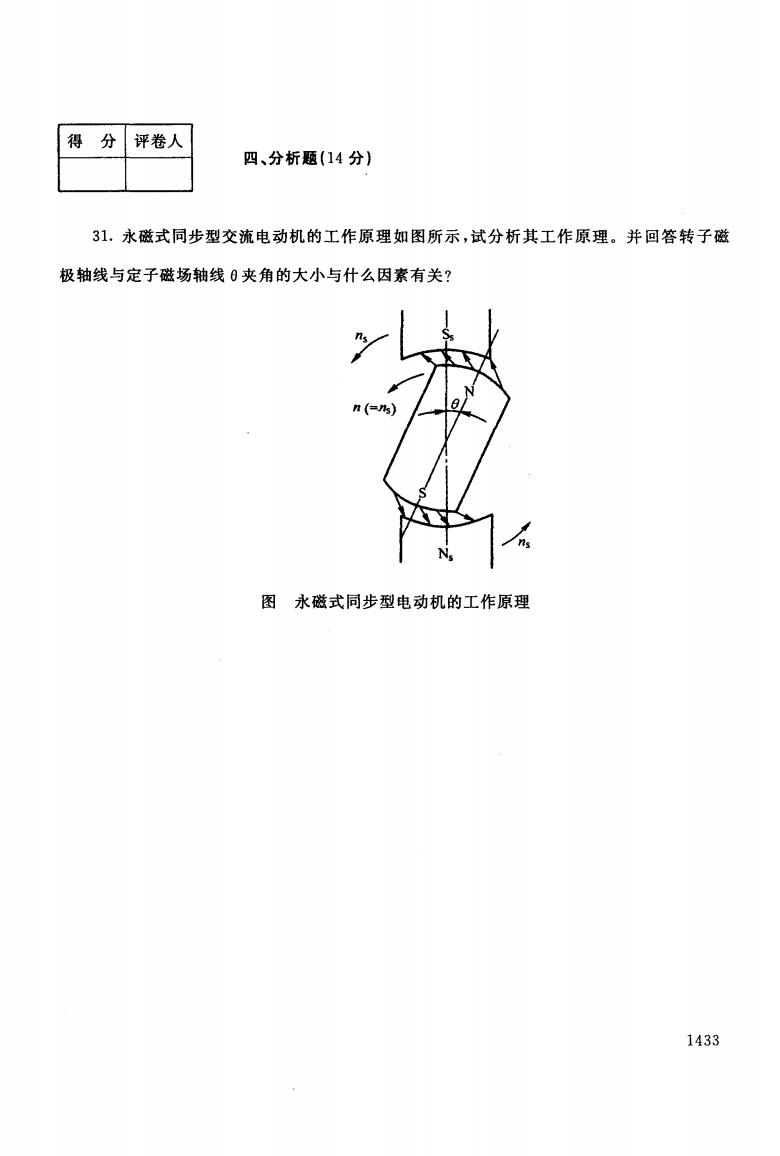
得 分 评卷人 四、分析题(14分) 31,永磁式同步型交流电动机的工作原理如图所示,试分析其工作原理。并回答转子磁 极轴线与定子磁场轴线日夹角的大小与什么因素有关? n (=ns) 图永磁式同步型电动机的工作原理 1433
|得分|评卷人| | 四、分析题(1 分} 1.永磁式同步型交流电动机的工作原理如图所示,试分析其工作原理。并回答转子磁 极轴线与定子磁场轴线。夹角的大小与什么因素有关? 永磁式同步型电动机的工作原理 1433
试卷代号:2432 国家开放大学(中央广播电视大学)2014年秋季学期“开放专科”期末考试 数控机床电气控制试题答案及评分标准 (供参考) 2015年1月 一、单选题(每小题3分,共54分) 1.A 2.A 3.A 4.B 5.C 6.A 7.B 8.A 9.A 10.C 11.A 12.B 13.C 14.B 15.B 16.A 17.C 18.B 二、判断题(每小题2分,共20分) 19.√ 20.× 21.X 22./ 23.X 24./ 25.× 26./ 27.X 28./ 三、简答题(每小题6分,共12分】 评分标准:可用学生自已的语言描述,含义近似可认为正确;不要求完整性。 29.在采样控制理论中有一个重要结论,冲量(窄脉冲的面积)相等而形状不同的窄脉冲 加在具有惯性的环节上时,其效果基本相同。电动机就是一个惯性的环节,该结论是SPWM 控制的重要理论基础。 30.数控机床控制系统的基本组成包括输入/输出装置、数控装置、伺服驱动装置、机床电 气逻辑控制装置、位置检测装置。 四、分析题(14分) 31.评分标准:可用学生自已的语言描述,含义近似可认为正确;不要求完整性。 交流伺服电动机的转子是一个具有两个极的永磁体(也可以是多极的)。(3分)按照电动 机学原理,当同步型电动机的定子三相绕组接通三相交流电源时,就会产生旋转磁场(Ns,Ss) 以同步转速s逆时针方向旋转。(3分)根据两异性磁极相吸的原理,定子磁极Ns(或Ss)紧 紧吸住转子,以同步转速s在空间旋转,即转子和定子磁场同步旋转。(3分) 当转子加上负载转矩后,转子磁极轴线将落后定子磁场轴线一个0夹角。转子的负载转矩 增大时,定子磁极轴线与转子磁极轴线间的夹角0增大;当负载转矩减小时0角减小。(5分) 1434
试卷代号 :2432 国家开放大学(中央广播电视大学 )2014 年秋季学期"开放专科"期末考试 数控机床电气控制 试题答案及评分标准 (供参考) 2015 一、单选题{每小题 分,共 54 分} l. A 2. A 3. A 6. A 7. B 8.A 11. A 12.B 13. C 16. A 17.C 18. B 二、判断题{每小题 分,共 20 分} 19. .J 20. X 21. X CCB AUEU BAB 22. .J 23. X 24. .J 25. X 26. .J 27. X 28. .J 三、简答题{每小题 分,共 12 分} 评分标准:可用学生自己的语言描述,含义近似可认为正确;不要求完整性。 29. 在采样控制理论中有一个重要结论,冲量(窄脉冲的面积)相等而形状不同的窄脉冲 加在具有惯性的环节上时,其效果基本相同。电动机就是一个惯性的环节,该结论是 SPWM 控制的重要理论基础。 30. 数控机床控制系统的基本组成包括输入/输出装置、数控装置、伺服驱动装置、机床电 气逻辑控制装置、位置检测装置。 四、分析题(1 分) 1.评分标准:可用学生自己的语言描述,含义近似可认为正确:不要求完整性。 交流伺服电动机的转子是一个具有两个极的永磁体(也可以是多极的 )0 (3 分)按照电动 机学原理,当同步型电动机的定子三相绕组接通三相交流电游、时,就会产生旋转磁场 (Ns Ss) 以同步转速 ns 逆时针方向旋转。 (3 分)根据两异性磁极相吸的原理,定子磁极 Ns( Ss) 紧吸住转子,以同步转速 ns 在空间旋转,即转子和定子磁场同步旋转。(3分) 当转子加上负载转矩后,转子磁极轴线将落后定子磁场轴线一个 夹角。转子的负载转矩 增大时,定子磁极轴线与转子磁极轴线间的夹角。增大;当负载转矩减小时 角减小。 (5 分) 1434